Download
1 / 17
170 likes | 308 Views
Compact, Configurable Inertial Gesture Recognition. Ari Y. Benbasat Responsive Environments Group MIT Media Laboratory. Uses of Inertial Technology. Conventionally: Position/Orientation tracking (missiles,vehicles,boreholes) Stabilization (Platforms, sights, etc)

E N D
Compact, ConfigurableInertial Gesture Recognition Ari Y. Benbasat Responsive Environments Group MIT Media Laboratory
Uses of Inertial Technology • Conventionally: • Position/Orientation tracking (missiles,vehicles,boreholes) • Stabilization (Platforms, sights, etc) • More Recently (with cheap, low-cost parts): • Human-Computer Interfaces • Joysticks (Microsoft) / Mice (GyroMouse) • Dance / Exercise • Shoes (MIT, Reebok Traxtar) • Toys
In the Academic Literature… • Musical Input • Sawada (Waseda): Accel-only system; connected 10 simple gestures to a MIDI controller • Digital Baton (MIT): Accels, pressure sensors and IR tracking linked to music • Palmtop Interfaces • Itsy (Compaq): Accels as both static (orientation) or dynamic input (fanning) • Design concepts by Small(MIT), Fitzmaurice(U of T), etc. • GW: • Hoffman (TU-Berlin): Similar high-level structure
Impetus • Inertial gestural systems often: • Are built in an ad hoc fashion • Limited sensors / axes • A priori heavy data analysis • Makes application building difficult • Therefore, we built a • General IMU • Framework for application designers
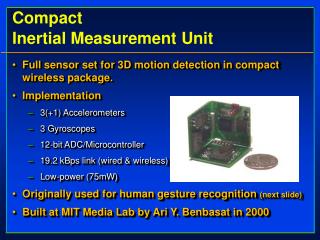
Compact Inertial Measurement Unit • Full sensor set for 3D motion detection in compact wireless package. • Implementation • 3(+1) Accelerometers • 3 Gyroscopes • 12-bit ADC/Microcontroller • 900 MHz wireless link • Low-power (75mW) • 66 Hz state updates • Allows direct sensing of quantities of interest
First Application: (void*)(with Synthetic Characters) • Control 1 of 3 characters • Buns and forks select dance-style movements (video) • HMM-based gesture recognition • Effective controller • But slow recognition and hard to threshold
S.M. Thesis Work • Create analysis and interpretation framework for such devices: • Analysis: Activity detection • Gesture Recognition: Parameterized atomic gestures • Output Scripting: Links gestures to outputs Project Organization
A Sample Data Stream • 1-8: Straight line gestures, various sizes • 9-15: There and back gestures, various sizes • Note regularity, number of peaks
Human Physiology • Unconstrained arm motion will minimize mean squared jerk (Flash and Hogan, MIT) • Values will scale with duration and magnitude • Therefore: • Strong general a priori • Natural parameterization Norm. Vel. Normalized Time
Activity Detection • Simple scheme based on windowed variance • Piecewise model of peak used to analytically find threshold • Finds areas of interest in data streams to be analyzed by the gesture recognition system • Err on side of false positives • Stuttering gestures OK
Gesture Recognition • Parameterized • Magnitude and duration are properties of the detected gestures, not fundamental to the process • Atomic • Considered on axis at a time • Considered only in units of a number of peaks • Algorithm • Expects net zero sum (accelerometers) • Non-trivial size (gyroscopes) • Pieces together stuttering gestures by combining failed gestures • Breaks gestures if polarity of adjacent peaks is identical
Scripting / Output • Simple scripts are used to link atomic gestures to output routines • Individual atoms can be matched to ranges • Atoms combined with AND / OR operands • Such combinations can then be put in a temporal order to create full gestures • Full gestures are linked to output routines
Sample Analysis Perform Gestures and Collect Data Find Areas of Activity y x (no rotation) Run Recognition Recombine Atomic Output 2 Peaks = + = = 3 Peaks
Sample Analysis (2) • Perform gesture • Sweeping twist • Find gestures in stream • One axis at a time • Note baseline subtraction • Recombine atoms • Can be tied to output 1 Peak (gyro) = = 2 Peaks (acc) sound light etc. = causes +
Application overview • Value in Applications: • Compact / low-power→useable in a wide variety of situations • Low complexity of algorithms allows for stand-alone devices → combined perception and expertise in single device • Not limited to human gesture • Limits: • No absolute reference frame • Separable gestures • Deliberate gestures
Early Applications • Re-implementation of forks and buns • Similar accuracy for an order of magnitude less time • Less fragile and easier to reconfigure • Palm III implementation • Demonstrate simplicity of algorithms • Only 2 accels (space restrictions) • 50 Hz update • Real time combination of gestures
Other Applications • Navigation - Update / reinitialize filters • Gestural information can allow velocity assumptions • Structure seen in physiological data also useful • E.g. zero jerk implies zero velocity • Draper “Smart Boot” work showed value of this approach • Things that Think • Closes the feedback loop between action and correction • Framework allows for robustness and easy alteration