Download
1 / 30
300 likes | 489 Views
INC341 Root Locus. Lecture 7. Rectangular vs. polar. j ω. s = 4 + j3. 3. σ. 4. Rectangular form: 4 + j3 Polar form magnitude=5, angle = 37. Rectangular form. Add, Subtraction. Polar form. Multiplication. Division. b. r. θ. a. Vector representation of a transfer function.

E N D
INC341Root Locus Lecture 7
Rectangular vs. polar jω s = 4 + j3 3 σ 4 Rectangular form: 4 + j3 Polar form magnitude=5, angle = 37
Rectangular form Add, Subtraction Polar form Multiplication Division
b r θ a
Vector s (s+a) (s+7) s = 5+j2 (s+a)
Example FindF(s) at s = -3+j4
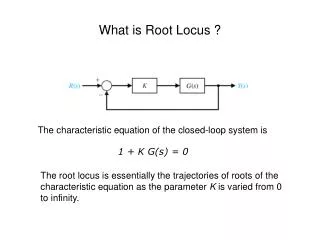
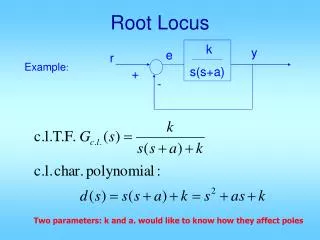
What is root locus and why is it needed? Fact I: poles of closed-loop system are an important key to describe a performance of the system (transient response, i.e. peak time, %overshoot, rise time), and stability of the system. Fact II: closed-loop poles are changed when varying gain. Implication: Root locus = paths of closed-loop poles as gain is varied.
Cameraman Object Tracking using infrared
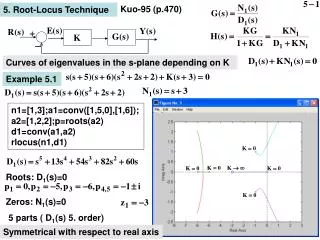
Varying gain (K) Varying K,closed-loop poles are moving!!!
Transient: • K<25 overdamped • K=25 critically damped • K>25 underdamped • Settling time remains the same under underdamped responses. Stability: • Root locus never crosses over into the RHP, system is always stable.
Closed-loop transfer function Characteristic equation magnitude phase
If there is any point on the root locus, its magnitude and phase will be consistant with the follows: Note that: phase is an odd multiple of 180 magnitude phase
Example Is the point -2+3j a closed-loop pole for some value of gain? Or is the point on the root locus?
-2+3j is not on the root locus!!! What about ?
The angles do add up to 180!!! is a point on the root locus What is the corresponding K?
Sketching Root Locus • Number of branches • Symmetry • Real-axis segment • Starting and ending points • Behavior at infinity
1. Number of branches Number of branches = number ofclosed-loop poles
2. Symmetry Root locus is symmetrical about the real axis
3. Real-axis segment On the real axis, the root locus exists to the left of an odd number of real-axis
Sum of angles on the real axis is either 0 or 180 (complex poles and zeroes give a zero contribution). • Left hand side of even number of poles/zeros on the real axis give 180 (path of root locus)
Example root locus on the real axis
4. Starting and ending points Root locus starts atfinite/infinite poles of G(s)H(s) And ends at finite/infinite zeros of G(s)H(s) closed-loop transfer function
K=0 (beginning) poles ofT(s) are K=∞ (ending) poles ofT(s) are
5. Behavior at infinity Root locus approachesasymptote asthe Locus approaches ∞, the asymptotes is given by
Rule of thumb # of poles = # of zeroes has 3 finite poles at 0 -1 -2, and 3 infinite zeroes at infinity
Example Sketch root locus