Download
1 / 5
50 likes | 159 Views
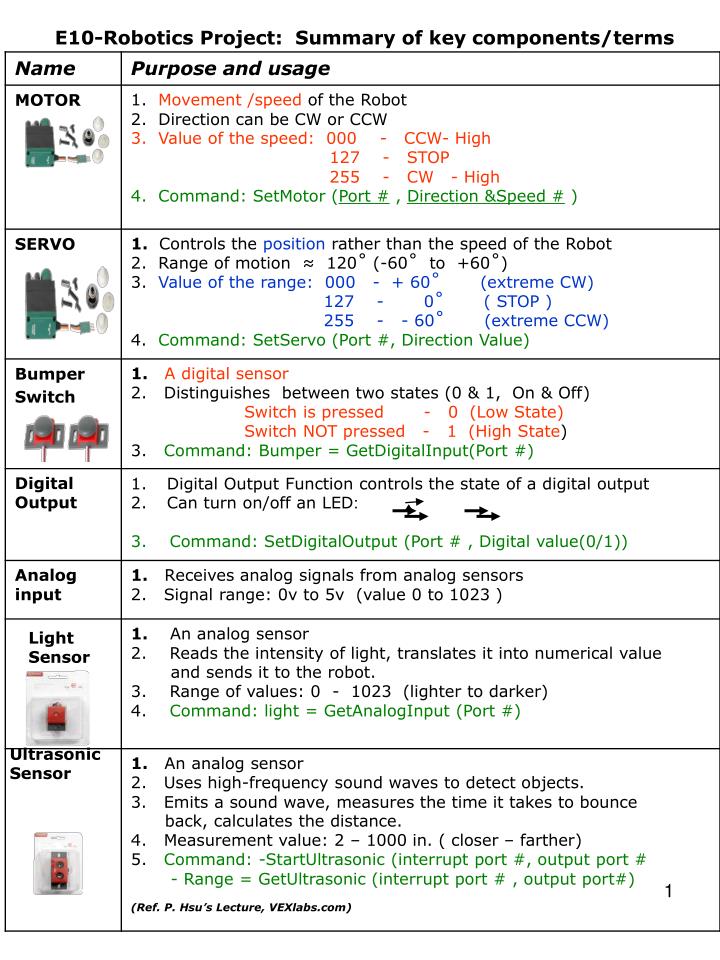
E10-Robotics Project: Summary of key components/terms. Light Sensor. Ultrasonic Sensor. Name Purpose and usage MOTOR 1. Movement /speed of the Robot 2. Direction can be CW or CCW 3. Value of the speed: 000 - CCW- High 127 - STOP

E N D
E10-Robotics Project: Summary of key components/terms Light Sensor Ultrasonic Sensor
Name Purpose and usage MOTOR 1. Movement /speed of the Robot • 2. Direction can be CW or CCW 3. Value of the speed: 000 - CCW- High 127 - STOP 255 - CW - High 4. Command: SetMotor (Port # , Direction &Speed # ) SERVO 1. Controls the position rather than the speed of the robot 2. Range of motion ≈ 120˚ (-60˚ to +60˚) 3. Value of the range: 000 - + 60˚ (extreme CW) 127 - 0˚ ( STOP ) 255 - - 60˚ (extreme CCW) 4. Command: SetServo (Port #, Direction Value) Bumper Switch 1. A digital sensor 2. Distinguishes between two states (0 & 1, On & Off) Switch is pressed - 0 (Low State) Switch NOT pressed - 1 (High State) 3. Command: Bumper = GetDigitalInput(Port #)
Questions A • The “High” state of the of a digital sensor (bumper switch) is: • 0 • 1 • 157 • 256
Question B The value of the motor speed, CCW-High is: • 255 • 127 • 000 • 60
Question C The value of the servo range at 0º (zero degrees) is: • 255 • 127 • 000 • 60