Download
1 / 52
520 likes | 716 Views
Simultaneous Segmentation and 3D Pose Estimation of Humans or Detection + Segmentation = Tracking?. Philip H.S. Torr Pawan Kumar, Pushmeet Kohli, Matt Bray Oxford Brookes University Andrew Zisserman Oxford Arasanathan Thayananthan, Bjorn Stenger, Roberto Cipolla Cambridge. Algebra.

E N D
Simultaneous Segmentation and 3D Pose Estimation of HumansorDetection + Segmentation = Tracking? Philip H.S. Torr Pawan Kumar, Pushmeet Kohli, Matt Bray Oxford Brookes University Andrew Zisserman Oxford Arasanathan Thayananthan, Bjorn Stenger, Roberto Cipolla Cambridge
Algebra • Unifying Conjecture • Tracking = Detection = Recognition • Detection = Segmentation • therefore • Tracking (pose estimation)=Segmentation?
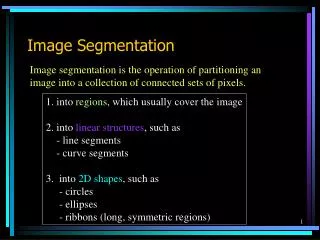
Objective Aim to get a clean segmentation of a human… Image Segmentation Pose Estimate??
Developments • ICCV 2003, pose estimation as fast nearest neighbour plus dynamics (inspired by Gavrilla and Toyoma & Blake) • BMVC 2004, parts based chamfer to make space of templates more flexible (a la pictorial structures of Huttenlocher) • CVPR 2005, ObjCut combining segmentation and detection. • ECCV 2006, interpolation of poses using the MVRVM (Agarwal and Triggs) • ECCV 2006 combination of pose estimation and segmentation using graph cuts.
Tracking as Detection (Stenger et al ICCV 2003) Detection has become very efficient, e.g. real-time face detection, pedestrian detection Example: Pedestrian detection [Gavrila & Philomin, 1999]: • Find match among large number of exemplar templates Issues: • Number of templates needed • Efficient search • Robust cost function
1280x1024 image, 11 subsampling levels, 80s Average number of filter per patch : 6.7 First filter : 19.8 % patches remaining
1280x1024 image, 11 subsampling levels, 80s Average number of filter per patch : 6.7 Filter 10 : 0.74 % patches remaining
1280x1024 image, 11 subsampling levels, 80s Average number of filter per patch : 6.7 Filter 20 : 0.06 % patches remaining
1280x1024 image, 11 subsampling levels, 80s Average number of filter per patch : 6.7 Filter 30 : 0.01 % patches remaining
1280x1024 image, 11 subsampling levels, 80s Average number of filter per patch : 6.7 Filter 70 : 0.007 % patches remaining
Hierarchical Detection • Efficient template matching (Huttenlocher & Olson, Gavrila) • Idea: When matching similar objects, speed-up by forming template hierarchy found by clustering • Match prototypes first, sub-tree only if cost below threshold
Trees • These search trees are the same as used for efficient nearest neighbour. • Add dynamic model and • Detection = Tracking = Recognition
Evaluation at Multiple Resolutions • One traversal of tree per time step
Evaluation at Multiple Resolutions • Tree: 9000 templates of hand pointing, rigid
Comparison with Particle Filters • This method is grid based, • No need to render the model on line • Like efficient search • Can always use this as a proposal process for a particle filter if need be.
Interpolation, MVRVM, ECCV 2006 Code available.
Energy being Optimized, link to graph cuts • Combination of • Edge term (quickly evaluated using chamfer) • Interior term (quickly evaluated using integral images) • Note that possible templates are a bit like cuts that we put down, one could think of this whole process as a constrained search for the best graph cut.
Likelihood : Edges 3D Model Input Image Edge Detection Projected Contours Robust Edge Matching
Chamfer Matching Input image Canny edges Distance transform Projected Contours
Likelihood : Colour 3D Model Input Image Projected Silhouette Skin Colour Model Template Matching
Template Matching = • Template Matching = constrained search for a cut/segmentation? • Detection = Segmentation?
Objective Aim to get a clean segmentation of a human… Image Segmentation Pose Estimate??
MRF for Interactive Image Segmentation, Boykov and Jolly [ICCV 2001] EnergyMRF = Unary likelihood Contrast Term Uniform Prior (Potts Model) Maximum-a-posteriori (MAP) solution x*= arg min E(x) x Data (D) Unary likelihood Pair-wise Terms MAP Solution
However… • This energy formulation rarely provides realistic (target-like) results.
Shape-Priors and Segmentation • Combine object detection with segmentation • Obj-Cut, Kumar et al., CVPR ’05 • Zhao and Davis, ICCV ’05 • Obj-Cut • Shape-Prior: Layered Pictorial Structure (LPS) • Learned exemplars for parts of the LPS model • Obtained impressive results = + Layer 1 Layer 2 LPS model
LPS for Detection • Learning • Learnt automatically using a set of examples • Detection Tree of chamfers to detect parts, assemble with pictorial structure and belief propogation.
Solve via Integer Programming • SDP formulation (Torr 2001, AI stats) • SOCP formulation (Kumar, Torr & Zisserman this conference) • LBP (Huttenlocher, many)
Obj-Cut Image Likelihood Ratio (Colour) Likelihood + Distance from Distance from ShapePrior
Integrating Shape-Prior in MRFs Pairwise potential Pixels Labels Unary potential Prior Potts model MRF for segmentation
Integrating Shape-Prior in MRFs Pairwise potential Pixels Labels Unary potential Prior Potts model Pose parameters Pose-specific MRF
Do we really need accurate models? Cow Instance Layer 2 Transformations Θ1 P(Θ1) = 0.9 Layer 1
Do we really need accurate models? • Segmentation boundary can be extracted from edges • Rough 3D Shape-prior enough for region disambiguation
Energy of the Pose-specific MRF Energy to be minimized Pairwise potential Unary term Potts model Shape prior But what should be the value of θ?
The different terms of the MRF Likelihood of being foreground given a foreground histogram Likelihood of being foreground given all the terms Shape prior model Grimson-Stauffer segmentation Shape prior (distance transform) Resulting Graph-Cuts segmentation Original image
Solve via gradient descent • Comparable to level set methods • Could use other approaches (e.g. Objcut) • Need a graph cut per function evaluation
However… • Kohli and Torr showed how dynamic graph cuts can be used to efficiently find MAP solutions for MRFs that change minimally from one time instant to the next: Dynamic Graph Cuts (ICCV05). But… … to compute the MAP of E(x) w.r.t the pose, it means that the unary terms will be changed at EACH iteration and the maxflow recomputed!
solve SA differences between A and B PB* Simpler problem A and B similar SB Dynamic Graph Cuts PA cheaper operation PB computationally expensive operation
Dynamic Image Segmentation Image Segmentation Obtained Flows in n-edges
Maximum flow MAP solution First segmentation problem Ga difference between Ga and Gb residual graph (Gr) second segmentation problem updated residual graph G` Gb Our Algorithm
Dynamic Graph Cut vs Active Cuts • Our method flow recycling • AC cut recycling • Both methods: Tree recycling
ExperimentalAnalysis Running time of the dynamic algorithm MRF consisting of 2x105 latent variables connected in a 4-neighborhood.
Segmentation Comparison Grimson-Stauffer Bathia04 Our method