Download
1 / 8
80 likes | 225 Views
Ground motion feed-forward option with corrector magnets. Jürgen Pfingstner 16 th of March 2011. System structure. x_hat. gm. y. x. QP. R. +. S. delay. -1. +. A. BBFB. Models and assumptions. Ground motion B10 No noise in BBFB and stabilization / feed-forward => reason

E N D
Ground motion feed-forward option with corrector magnets JürgenPfingstner 16th of March 2011
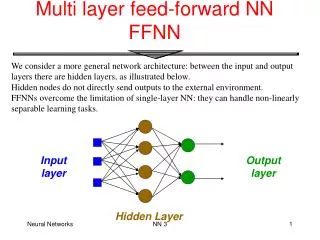
System structure x_hat gm y x QP R + S delay -1 + A BBFB
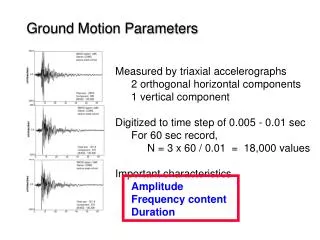
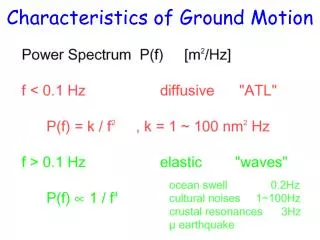
Models and assumptions • Ground motion B10 • No noise in BBFB and stabilization / feed-forward • => reason • Model predicts first PSD of ground motion and calculates the luminosity loss • => procedure explained • by Daniel at the ACE • => assumes fully • stabilized final focus • Actuator: low-pass of 1st or 2nd order (adiabatic damping) with time constant T1. • Actuator acts for BBFB as discrete system, but for feed-forward as continuous system. Transformation with input step function: • Delay:
Standard stabilization with imperfect corrector magnet for BBFB