Download
1 / 1
10 likes | 142 Views
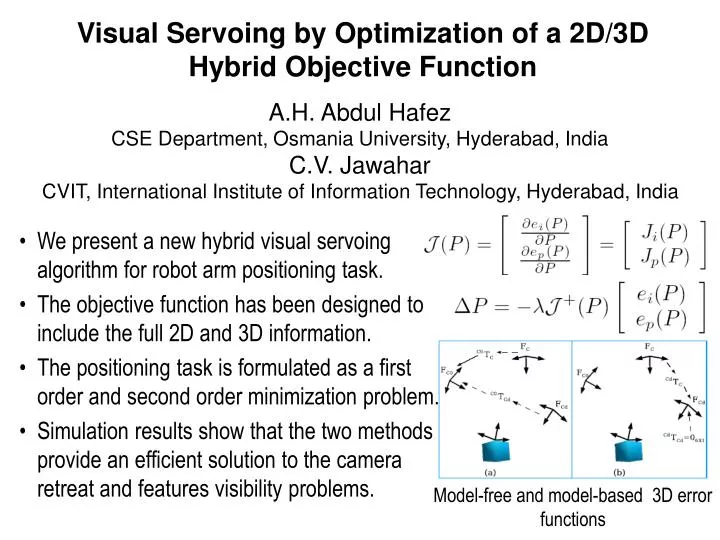
Visual Servoing by Optimization of a 2D/3D Hybrid Objective Function. A.H. Abdul Hafez CSE Department, Osmania University, Hyderabad, India C.V. Jawahar CVIT, International Institute of Information Technology, Hyderabad, India.

E N D
Visual Servoing by Optimization of a 2D/3D Hybrid Objective Function A.H. Abdul Hafez CSE Department, Osmania University, Hyderabad, India C.V. JawaharCVIT, International Institute of Information Technology, Hyderabad, India • We present a new hybrid visual servoing algorithm for robot arm positioning task. • The objective function has been designed to include the full 2D and 3D information. • The positioning task is formulated as a first order and second order minimization problem. • Simulation results show that the two methods provide an efficient solution to the camera retreat and features visibility problems. Model-free and model-based 3D error functions