Download
1 / 22
230 likes | 471 Views
Ch 5 part2 Geometric Transformation. CS446 Instructor: Nada ALZaben. Transforming Points. Suppose that ( w,z ) and ( x,y ) are two spatial coordinates systems called the input space and output space , respectively

E N D
Ch 5 part2Geometric Transformation CS446 Instructor: Nada ALZaben
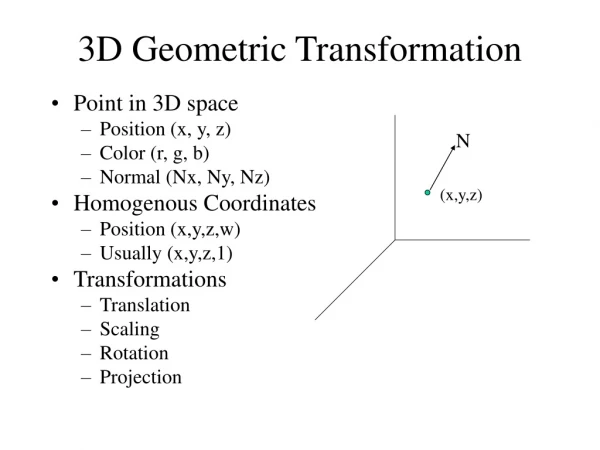
Transforming Points • Suppose that (w,z) and (x,y) are two spatial coordinates systems called the input space and output space, respectively • A geometric coordinate transformation can be defined that maps input space to output space points: (x,y) = T{(w,z))} • T{.} is called a forward transformation or forward mapping • If T{.} has an inverse, then the inverse maps output space points to input space points: (w,z) = T-1{(x,y)} • T-1{.} is called the inverse transformation or inverse mapping
Affine Transformations • An affine transformation is a mapping from one vector space to another, consisting of: • A linear part expressed as matrix multiplication • And an additive part, an offset or translation • For two-dimensional space an affine transformation can be written as: • Which can be written as a single matrix multiplication by adding a third coordinate: • Also can be written: [x y 1] = [w z 1] T , where T is the affine matrix • The notational convention of adding a 1 to the [x y] and [w z] vectors results in a homogeneous coordinates
Affine Transformation • Important affine transformation include: • Scaling • Rotation • Translation • Sharing • Refliction
Affine Transformation • Rotation, translation and reflection belong to an important subset of affine transformation called similarity transformation • Similarity transformation preserves angles between lines and changes all distance in the same ration →preserves shapes • Scaling is a similarity transformation when the horizontal and vertical scale factors are the same
Projective Transformations • Affine transformation is a special case of projective transformation • In projective transformation, line map to lines but most parallel lines do not stay parallel • It is useful to define two-dimensional projective transformation using an auxiliary third dimension: • The auxiliary dimension h is not a constant • a13and a23are nonzero • and x = x’/h and y = y’/h
Projective Transformations • The figure shows the set of parallel lines transform to output-space lines that intersect at locations called vanishing points which lines on the horizon line • Only parallel lines parallel to the horizon line remain parallel when transformed • All other set of parallel lines transform to lines that intersect at a vanishing point on the horizon line
Applying Geometric Transformations to Images • g(x,y) = f( T-1{(x,y)} ) • The procedure for computing the output pixel at location (xk , yk) is: • Evaluate (wk , zk) = T-1{(xk , yk)} • Evaluate f(wk , zk) • g(xk , yk) = f(wk , zk) • The procedure is sometimes called inverse mapping
Image Interpolation • We examine more closely the second step, evaluating f(wk , zk), where f is the input image and (wk , zk) = T-1{(xk , yk)} • Even if xkandykare integers, wkandzk usually are not • For digital images the values of f are known only at integer-valued locations • Using these known values to evaluate f at non-integer-valued locations is an example of interpolation – the process of constructing a continuously defined function from discrete data • Nearest-neighbor interpolation: • The value of f’(x) is computed as the value of f(y) at the location y closest to x, if f(y) defined for integer values of y: f’(x) = f(round(x))
Image Interpolation • Bilinear interpolation: • The process of interpolating in two dimensions using a sequence of one-dimensional linear interpolations • Bicubic interpolation: • The process of interpolating in two dimensions using a sequence of one-dimensional cubic interpolations
Image Registration • One of the most important image processing applications of geometric transformations • Image registration methods seek to align two or more images of the same scene • e.g. Images taken at different times such as satellite images to detect environment changes, or images taken at the same time but with different instruments
Image Registration Process • Image registration methods consist of the following basic steps: • Detect features • Match corresponding features • Infer geometric transformation • Use the geometric transformation to align one image with the other • An image feature: is any portion of an image that can potentially be identified and located in both images (e.g. points, lines, corners)
Image Registration Process • Image registration methods can be manual or automatic depending on whether feature detection and matching is human-assisted or performed using an automatic algorithm • Image transformation can be: • Global transformation: transformation function is the same everywhere in the image • Affine transformation, projective transformation and polynomial transformation • Local transformation: a transformation function with locally varying parameters
Resource • R.C. Gonzalez and R.E. Woods, Digital Image Processing Using MATLAB, 2rd Edition, Mc Graw Hill