Download
1 / 16
161 likes | 515 Views
VECTOR CONTROLLED RELUCTANCE SYNCHRONOUS MOTOR DRIVES WITH PRESCRIBED CLOSED-LOOP SPEED DYNAMICS. Model of Reluctance Synchronous Motor.

E N D
VECTOR CONTROLLED RELUCTANCE SYNCHRONOUS MOTOR DRIVES WITH PRESCRIBED CLOSED-LOOP SPEED DYNAMICS
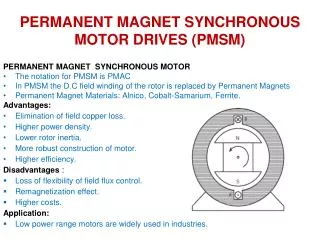
Model of Reluctance Synchronous Motor Non-linear differential equations formulated in rotor-fixed d,q co-ordinate system describe the reluctance synchronous motor and form the basis of the control system development.
Dynamic torque equation Vector control condition for maximum torque a) per unit stator current Demanded dynamic behavior b) for a given stator flux Linearising function b) a) • Master Control Law
a) Pseudo-Sliding Mode Observer for Rotor Speed definition of error Motor equations Model system
Condition for Sliding Motion Error system Sliding-Mode Observer Pseudo-SMC Observer Equivalent variables Estimate of rotor speed Angular velocity extractor
Filtered values of and are produced by theobserverbased on Kalman filter Load torque is modeled as a state variable where design of: needs adjustment of the one parameter only or as two different poles: The Filtering Observer VJ Electrical torque of SRM is treated as an external model input
demanded rotor speed rotor position sensor external load demanded d_q stator currents Slave control law demanded three- phase voltages G torque L I U d dem w d_q a_b & a,b,c transf 1 Reluctance Synchronous Motor Power electronic drive circuit d U Master Control Law Switching table q 2 T U w 3 I q dem U dc s w Measured variables: rotor position, stator current, DC circuit voltage I r I d a_b & d_q transf. 1 I U I d I - I U I q q q d 3 2 U U d q v d_eq Filtering observer Rotor flux calculator Sliding-mode observer v * q_eq w * Y r Angular velocity extractor Y Y d q * w r Original control structure of speed controlled RSM
Model TF Parameter mismatch increases a correction Mason’s rule MRACouter loop Inner & Middle Loop (real system) correction loop Reference Model (of closed-loop system)
a) id,iq = f(t) b) Yd,Yq = f(t) c) Ld= f(t) d) wid,west = f(t) e) GL, GLest = f(t) f) wid,wr = f(t) Simulation results a1) id=const without MRAC
a) id,iq = f(t) b) Yd,Yq = f(t) c) Ld= f(t) d) wid,west = f(t) e) GL, GLest = f(t) f) wid,wr = f(t) Simulation results a2) id=const with MRAC
a) id,iq = f(t) b) Yd,Yq = f(t) c) Ld= f(t) d) wid,west = f(t) e) GL, GLest = f(t) f) wid,wr = f(t) Simulation results (without MRAC)b1) dq-current angle control
a) id,iq = f(t) b) Yd,Yq = f(t) c) Ld= f(t) d) wid,west = f(t) e) GL, GLest = f(t) f) wid,wr = f(t) Simulation results (with MRAC)b2) dq-current angle control
Effect of MRAC on Various Types of Prescribed Dynamics b) first order dyn. c) second ord. dyn. a) constant torque
Conclusions and Recommendations • The simulation results of the proposed new control method for electric drives employing SRM show a good agreement with the theoretical predictions. • The only departure of the system performance from the ideal is the transient influence of the external load torque on the rotor speed. • This effect is substantially reduced if MRAC outer loop is applied. • It is highly desirable to employ suggested control strategy experimentally.