Download
1 / 27
270 likes | 415 Views
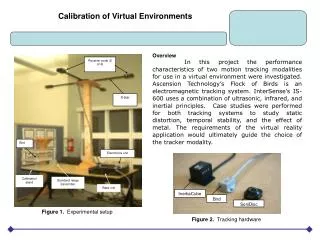
Quaternions Design and Creation of Virtual Environments CISE 6930/4930 Section 6589/3146. Benjamin Lok Fall 2003. Euler Angles. Orientation of an object in computer graphics is often described using Euler Angles. R x R y R z Any axis order will work and could be used. Yaw, Pitch & Roll.

E N D
QuaternionsDesign and Creation of Virtual EnvironmentsCISE 6930/4930 Section 6589/3146 Benjamin Lok Fall 2003
Euler Angles • Orientation of an object in computer graphics is often described using Euler Angles. • RxRyRz • Any axis order will work and could be used. • Yaw, Pitch & Roll
Problems with Euler Angles • Rotations not uniquely defined • Ex: (z, x, y) [roll, yaw, pitch] = (90, 45, 45) = (45, 0, -45)takes positive x-axis to (1, 1, 1) • Cartesian coordinates are independent of one another, but Euler angles are not • Remember, the axes stay in the same place during rotations • Gimbal Lock • Term derived from mechanical problem that arises in gimbal mechanism that supports a compass or a gyro • Second and third rotations have effect of transforming earlier rotations, we lose a degree of freedom • ex: Rot x, Rot y, Rot z • If Rot y = 90 degrees, Rot z is equivalent to -Rot x
A Gimble is a hardware implementation of Euler angles (used for mounting gyroscopes and globes)
Another Problem with Euler Angles • What if we want to produce a smooth animation of a rotation from point P1 to Point P2 around some axis. • The entire rotation is defined as RxRyRz but how do we get an intermediate point? • Rotations are defined as rotations about the x, y and z axes. Rotations about any other vector in space have to be broken down into equivalent rotations about the major axes.
Smooth Rotation y With Euler Angles, knowing the transformations for the entire rotation does not help us with the intermediate rotations. Each is a unique set of three rotations about the x,y and z axes z x
Quaternions • Invented by Sir William Hamilton (1843) • Do not suffer from Gimbal Lock • Provide a natural way to interpolate intermediate steps in a rotation about an arbitrary axis • Are used in many position tracking systems and VR software support systems
Quaternions Definitions & Basic Operations
Remember Complex Numbers? z = a + i b where i = (-1) Can think of a complex number as having a real and an imaginary part or as a vector in two-dimensional space z = [a, b] z1+z2 = (a1 + i b1) + (a2 + i b2) = (a1+a2) + i (b1+b2) z1*z2 = (a1+i b1)*(a2+i b2) = (a1a2–b1b2) + i (a2b1+a1b2)
Quaternions • You can think of quaternions as an extension of complex numbers where there are three different square roots of -1. • q = w + i x + j y + k z where • i = (-1), j = (-1), k = (-1) • i*j = k, j*k = i, k*i = j • j*i = -k, k*j = -i, i*k = -j • You could also think of q as a value in four-dimensional space, q = [w, x, y, z] • Sometimes written as q = [w, v] where w is a scalar and v is a vector in 3-space
Addition of Quaternions q1 + q2 = (w1+ix1+j y1+k z1) + (w2+ix2+j y2+k z2) = w1+w2 + i (x1+x2) + j (y1+y2) +k (z1+z2) q1 + q2 = [w1, v1] + [w2, v2] = [w1+w2, v1+v2]
Multiplication of Quaternions q1 * q2 = (w1+ix1+j y1+k z1) * (w2+ix2+j y2+k z2) = w1w2 + i w1x2 + j w1y2 + k w1z2 + -x1x2 + i w2x1 – j x1z2 + k x1y2 + -y1y2 + i y1z2 + j w2y1 - k x2y1 + -z1z2 - i y2z1 + j x2z1 + k w2z1 q1 * q2 = [w1, v1] * [w2, v2] =
Multiplication of Quaternions q1*q2 = (w1+ix1+jy1+kz1)*(w2+ix2+jy2+kz2) = w1w2 + i w1x2 + j w1y2 + k w1z2 + -x1x2 + i w2x1 – j x1z2 + k x1y2 + -y1y2 + i y1z2 + j w2y1 - k x2y1 + -z1z2 - i y2z1 + j x2z1 + k w2z1 q1*q2 = [w1, v1] * [w2, v2] = [w1w2 – v1°v2, w1v2 +w2v1+ v1v2]
Practice • q1 = [1.57 0 0 1], q2= [.78 0 1 0] • q1 = [.25 3 4 4], q2= [.20 2 9 9] • q1 + q2? q1 + q2 = w1+w2 + i (x1+x2) + j (y1+y2) +k (z1+z2) q1 + q2 = [w1+w2, v1+v2] • q1 * q2? q1 * q2 = (w1+ix1+j y1+k z1) * (w2+ix2+j y2+k z2) = w1w2 + i w1x2 + j w1y2 + k w1z2 + -x1x2 + i w2x1 – j x1z2 + k x1y2 + -y1y2 + i y1z2 + j w2y1 - k x2y1 + -z1z2 - i y2z1 + j x2z1 + k w2z1 [w1w2 – v1°v2, w1v2 +w2v1+ v1v2]
Other operations ||q|| = (w2 + x2 + y2 + z2) ||q|| = 1 is a unit quaternion The inverse of a quaternion, q-1 =[w, -v]/ ||q||2 q*q-1 = [1,0,0,0] Practice: Find ||q|| and q-1 of q1 = [1.57 0 0 1], q2 = [.25 3 4 4] Quaternion multiplication is associate but not commutative
Find the inverse of q = [0,6,8,0] q-1 =[w, -v]/ ||q||2 q-1 =[0,-6,-8,-0]/(0+36+64+0) = [0,-.06,-.08,0]
Find the inverse of q = [0,6,8,0] q-1 =[w, -v]/ ||q||2 q-1 =[0,-6,-8,-0]/(0+36+64+0) = [0,-.06,-.08,0] To check, q*q-1 should give us the identity quaternion. q*q-1 = [0-(6*-.06 + 8*-.08 + 0),[0,0,0]+ [0,0,0] +[0,0,0]] = [1,0, 0, 0] [w1w2 – v1°v2, w1v2 +w2v1+ v1v2]
Quaternions Rotating with Quaternions
Rotation about an arbitrary axis • Let q be a unit quaternion, i.e., ||q|| = 1 • q = [w,x,y,z] describes a rotation through an angle where w = cos(/2) and [x,y,z] is the axis of rotation. (x,y,z)
Procedure • To create a unit quaternion that represents a rotation of degrees about an arbitrary axis v = [x,y,z]. q = [cos(/2), sin(/2)*v/||v||]
Find q, s/t q describes a rotation of 60 degrees about v = [3,4,0]. • Remember, we need a unit quaternion. • To get this: • Compute cos (60/2) = cos30 = 1/2 • Compute sin (60/2) = sin30 = 3/2 • Compute v’ = v/||v|| = [3,4,0]/5 = [3/5,4/5,0] • q = [1/2, 3/2*[3/5,4/5, 0]] = [1/2, 33/10, 43/10, 0] • ||q|| = ¼ + 27/100 + 48/100 = (25+27+48)/100 = 1
To rotate a point, P = (px,py,pz) • Protated = q[0,P]q-1 • Remember this is quaternion multiplication not matrix multiplication!
y x z Example: P = (0,1,1) rotated 90 degrees about the vertical y-axis. Rotated point should be (1,1,0)
Example: P = (0,1,1) rotated 90 degrees about the vertical y-axis. • First, compute q • q = [cos(90/2), sin(90/2)[0,1,0]] • q = [cos45, 0, sin45, 0] = [2/2, 0, 2/2, 0] • Next compute q-1 • q-1 = [2/2, 0, -2/2, 0] Why? • Compute q[0,P]q-1 =[2/2, 0, 2/2, 0][0,0,1,1][2/2, 0, -2/2, 0]
Compute q[0,P]q-1 =[2/2, 0, 2/2, 0][0,0,1,1][2/2, 0, -2/2, 0] Remember that q1*q2 = [w1w2 – v1°v2, w1v2 +w2v1+ v1v2] so q[0, P] = [2/2, 0, 2/2, 0][0,0,1,1] = [2/2*0 – [0,2/2,0]°[0,1,1], 2/2[0,1,1] + 0*v1 + v1 x v2 ] = [-2/2, 2/2, 2/2, 2/2] q[0, P] q-1 = [-2/2, 2/2, 2/2, 2/2][2/2, 0, -2/2, 0] = [-2/2* 2/2 – [2/2, 2/2, 2/2]°[0, -2/2, 0], (-2/2)[0, -2/2, 0] +(2/2)*[2/2, 2/2, 2/2] + v1 x v2 = [0, [1/2,1,1/2] + [1/2 ,0,-1/2] = [0, 1, 1, 0] Transformed point is [1,1,0]. See notes page for ALL the details
Why use quaternions? • If you want to apply multiple rotations, say q1 and q2. • When? • Recall: q[0,P]q-1 • Thus: q2 (q1 [0,P] q1-1 ) q2-1 • (q2 q1) [0,P] (q1-1 q2-1 ) • q2 * q1 • Why is a quaternion multiplication better than a matrix multiply? • What about keeping rotations?
Smooth Interpolation • SLERP – spherical linear interpolation • slerp(t, a, b) = f(t) = (b.a-1)t a • What happens when t=0? t=1? • In actuality, we need to conserve camera velocity (Spherical – Cubic Interpolation) Why? • Where have you seen this before? • Bezier/Hermite curves • slerp (t,a,c,d,b) • a, b – start points, c,d – define curve • The curve touchs cd when t=0.5 D A B C