Download
1 / 1
90 likes | 374 Views
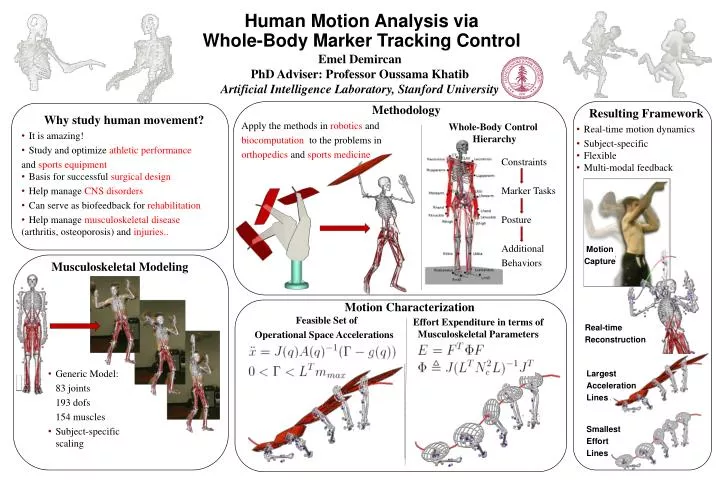
Human Motion Analysis via Whole-Body Marker Tracking Control. Emel Demircan PhD Adviser: Professor Oussama Khatib Artificial Intelligence Laboratory, Stanford University. Methodology Apply the methods in robotics and b iocomputation to the problems in

E N D
Human Motion Analysis via Whole-Body Marker Tracking Control Emel Demircan PhD Adviser: Professor Oussama Khatib Artificial Intelligence Laboratory, Stanford University Methodology Apply the methods in roboticsand biocomputation to the problems in orthopedics and sports medicine • Resulting Framework • Real-time motion dynamics • Subject-specific • Flexible • Multi-modal feedback • Why study human movement? • It is amazing! • Study and optimize athletic performance • and sports equipment • Basis for successful surgical design • Help manage CNS disorders • Can serve as biofeedback for rehabilitation • Help manage musculoskeletal disease • (arthritis, osteoporosis) and injuries.. Whole-Body Control Hierarchy Constraints Marker Tasks Posture Additional Behaviors Motion Capture Musculoskeletal Modeling Motion Characterization Feasible Set of Operational Space Accelerations Effort Expenditure in terms of Musculoskeletal Parameters Real-time Reconstruction • Generic Model: • 83 joints • 193 dofs • 154 muscles • Subject-specific scaling Largest Acceleration Lines Smallest Effort Lines