Download
1 / 18
190 likes | 546 Views
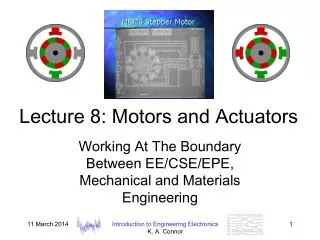
Stepper Motors – An Overview. Aliasgar Kutiyanawala Utah State University. What’s a Stepper Motor?.

E N D
Stepper Motors – An Overview Aliasgar Kutiyanawala Utah State University Aliasgar Kutiyanawala
What’s a Stepper Motor? A stepper motor is a motor that, as the name suggests, moves in steps. Stepping motors are known in German as Schrittmotoren, in French as moteurs pas à pas, and in Spanish as motor paso paso. Aliasgar Kutiyanawala
Compare With a Servo • Stepper motors are similar to servo motors as we can perform position control with both. • However, Servo motors require some form of analog feedback whereas stepper motors are often open loop. • Stepping motors can be used in simple open-loop control systems; these are generally adequate for systems that operate at low accelerations with static loads, but closed loop control may be essential for high accelerations. Aliasgar Kutiyanawala
Compare With a Servo (Contd.) • For high accelerations with variable loads, all rotor information is lost, and we require closed loop for accurate control • Servo motors are not subject to this problem Aliasgar Kutiyanawala
Types of Stepper Motors • Permanent Magnet • Employ permanent magnet • Low speed, relatively high torque • Variable Reluctance • Does not have permanent magnet • Low torque Aliasgar Kutiyanawala
Types of Stepper Motors • Hybrid • multi-toothed stator poles and a permanent magnet rotor • High static and dynamic torque Aliasgar Kutiyanawala
Variable Reluctance Motors The variable reluctance motor in the illustration has four "stator pole sets" (A, B, C,), set 15 degrees apart. Current applied to pole A through the motor winding causes a magnetic attraction that aligns the rotor (tooth) to pole A. Energizing stator pole B causes the rotor to rotate 15 degrees in alignment with pole B. This process will continue with pole C and back to A in a clockwise direction. Reversing the procedure (C to A) would result in a counterclockwise rotation. Aliasgar Kutiyanawala
Permanent Magnet Motors Unlike the other stepping motors, the PM motor rotor has no teeth and is designed to be magnetized at a right angle to it's axis. The above illustration shows a simple, 90 degree PM motor with four phases (A-D). Applying current to each phase in sequence will cause the rotor to rotate by adjusting to the changing magnetic fields. Although it operates at fairly low speed the PM motor has a relatively high torque characteristic. Aliasgar Kutiyanawala
Hybrid Motors They are constructed with multi-toothed stator poles and a permanent magnet rotor. Standard hybrid motors have 200 rotor teeth and rotate at 1.80 step angles. Other hybrid motors are available in 0.9ºand 3.6º step angle configurations. Because they exhibit high static and dynamic torque and run at very high step rates, hybrid motors are used in a wide variety of industrial applications. Aliasgar Kutiyanawala
Types of Windings • Unipolar motors • Bipolar motors • Bifilar motors • Multiphase motors Aliasgar Kutiyanawala
Unipolar Motors Unipolar stepping motors, both Permanent magnet and hybrid stepping motors with 5 or 6 wires are usually wired as shown in the figure, with a center tap on each of two windings. In use, the center taps of the windings are typically wired to the positive supply, and the two ends of each winding are alternately grounded to reverse the direction of the field provided by that winding. As shown in the figure, the current flowing from the center tap of winding 1 to terminal a causes the top stator pole to be a north pole while the bottom stator pole is a south pole. Aliasgar Kutiyanawala
Unipolar Motors This attracts the rotor into the position shown. If the power to winding 1 is removed and winding 2 is energized, the rotor will turn 30 degrees, or one step. To rotate the motor continuously, we just apply power to the two windings in sequence. Assuming positive logic, where a 1 means turning on the current through a motor winding, the following two control sequences will spin the motor illustrated in the figure. Aliasgar Kutiyanawala
Bipolar Motors The bipolar motor is similar inc construction to the unipolar motor except that it does not have any center taps.The advantage gained in the simplicity of construction of the motor is lost in the control circuitry as that becomes more complex. A H-bridge is required for the control of the motor. Aliasgar Kutiyanawala
Bifilar Motors Bifilar windings on a stepping motor are applied to the same rotor and stator geometry as a bipolar motor, but instead of winding each coil in the stator with a single wire, two wires are wound in parallel with each other. Aliasgar Kutiyanawala
Multiphase Motors Thispermanent magnet stepping motor is wired with all windings of the motor in a cyclic series, with one tap between each pair of windings in the cycle. The most common designs in this category use 3-phase and 5-phase wiring. Aliasgar Kutiyanawala
What Is Micro Stepping? • Micro stepping is a way of moving the stator flux of a stepper more smoothly than in full- or half-step drive modes. This results in less vibration, and makes noiseless stepping possible down to 0 Hz. • It also makes smaller step angles and better positioning possible. • In many applications microstepping can increase system performance, and lower system complexity and cost, • compared to full- and half-step driving techniques. Microstepping can be used to solve noise and resonance problems, and to increase step accuracy and resolution. Aliasgar Kutiyanawala
Controlling A Stepper Motor • H – Bridges • UC3717A from TI and other similar devices from vendors Aliasgar Kutiyanawala
Acknowledgements • Jones on Stepper Motors http://www.cs.uiowa.edu/~jones/step/ • Advanced Micro Systems http://www.ams2000.com/stepping101.html Aliasgar Kutiyanawala