Download
1 / 54
560 likes | 890 Views
Spectral surface reconstruction. Reporter: Lincong Fang 24th Sep, 2008. Point clouds. Surface reconstruction. Unorganized Unoriented (no oriented normals) Non-uniform, sparse sampling Possibly with noise. Applications. Computer Graphics Medical Imaging Computer-aided Design

E N D
Spectral surface reconstruction Reporter: Lincong Fang 24th Sep, 2008
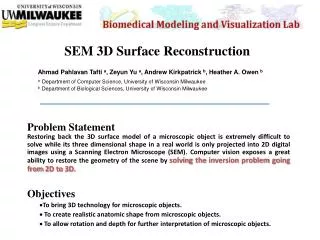
Surface reconstruction • Unorganized • Unoriented (no oriented normals) • Non-uniform, sparse sampling • Possibly with noise
Applications • Computer Graphics • Medical Imaging • Computer-aided Design • Solid Modeling
Approaches • Delaunay\Voronoi based • Implicit surfaces • Deformable models • Spectral • Etc.
Approaches • Delaunay\Voronoi based Unorganized, unoriented, non-uniform, noise
Approaches • Implicit surfaces Unorganized, unoriented, non-uniform, noise
Approaches • Deformable models Adrei Sharf, Thomas Lewiner, ArielShamir, Leif Kobbelt, Daniel Cohen–OR. Competing fronts for coarse–to–fine surface reconstruction. EG2006
Approaches • Delaunay\Voronoi based • Implicit surfaces • Deformable models • Spectral • Etc. • [1] R. Kolluri, J. Richard Shewchuk, J. F. O’Brien, • Spectral surface reconstruction from noisy point clouds. SGP 2004. • [2] P. Alliez, D. Cohen-Steiner, Y. Tong, M. Desbrun Voronoi-based variational reconstruction of unoriented point sets. SGP 2007.
Spectral surface reconstruction from noisy point clouds • R. Kolluri (Google) • J. Richard Shewchuk • J. F. O’Brien • University of Califonia, Berkeley • SGP 2004
The eigencrust algorithm • Partition the tetrahedra of a Delaunay tetrahedralization into inside/outside • Identify the triangular faces that interface between the subgraphs
Poles Nina Amenta, Marshall Bern, Manolis Kamvysselis. A new Voronoi-based surface reconstruction algorithm. SigGraph 98
Pole graph G The negatively weighted edges of the pole graph
Pole graph G The positively weighted edges of pole graph
The final mesh • The final mesh is the “eigencrust” • The triangles where the inside and outside tetrahedra meet
Results • If all adjacent tetrahedra are labeled the same, the point is an outlier • Undersampled regions are handled without holes
Efficacy 2008414 input points Tetrahedralize:13.5 minutes 157 minutes 265minutes
Voronoi-based variational reconstruction of unoriented point sets • P. Alliez • D. Cohen-Steiner • Y. Tong • M. Desbrun • SGP 2007 (best paper award)
Pierre Alliez • Researcher at INRIA in the GEOMETRICA group • Research • Geometry Processing: geometry compression, surface approximation, mesh parameterization, surface remeshing and mesh generation • Avid user of the CGAL library • CGAL developer
David Cohen-Steiner • Researcher at INRIA in the GEOMETRICA team • Research • Approximation problems in applied geometry and topology • Meshes and point clouds are of particular interest
Yiying Tong • Assistant Professor • Computer Science and Engineering Dept. at Michigan State University • Research • Computer simulation/animation • Discrete geometric modeling • Discrete differential geometry • Face recognition using 3D models
Mathieu Desbrun • Associate Professor in Computer Science and Computational Science & Engineering • California Institute of Technology • Research • Applying discrete differential geometry to a wide range of fields and applications
Point set Tensor estimation Implicit function + contouring Overview
Tensors Implicit function Implicit function
Variational formulation • Find implicit function f such that its gradient f best aligns to the principal component of the tensors Biharmonic energyMeasures smoothness of f Anisotropic Dirichlet energy Measures alignment with tensors Regularization
Rationale • Anisotropic tensors: favor alignment • Isotropic tensors: favor smoothness
Rationale • Anisotropic tensors: favor alignment • Isotropic tensors: favor smoothness Large aligned gradients + smoothness ->consistent orientation of f
Solver V vertices {vi} E edges {ei} Tensor C F=(f1,f2,…,fv)t A: Anisotropic Laplacian operator B: Isotropic Bilaplacian operator Desbrun M, Kanso E, Tong Y. Discrete differential forms for Computational modeling. In Discrete Differential Geometry. ACM SIGGRAPH Course, 2006.
Generalized eigenvalue problem Eigenvector (PWL function) max
Standard eigenvalueproblem Solver: Implicitly restarted Arnoldi method (ARPACK++)
Contouring F=(f1,f2,…,fv)t
Poisson GEP Comparison Poisson reconstruction