Download
1 / 14
140 likes | 368 Views
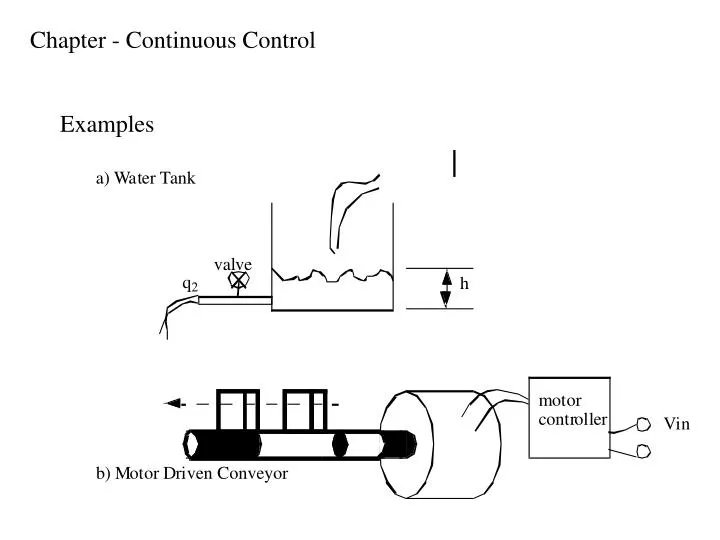
Chapter - Continuous Control. Examples. A Feedback Controller. Continuous Feedback - Logical Output. Ladder Logic Example. Block Diagram. An Example. Continuous Feedback and Output. Proportional Control Equations. Modeling Behavior with Differential Equations.

E N D
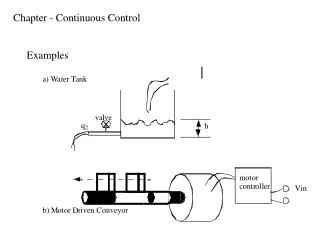
Chapter - Continuous Control Examples
PID CONTROL AND STATUS BITS pid.CTL:DINT pid.EN:BOOL - the PID function is enabled and running pid.PVT:BOOL - pid.DOE:BOOL - 0=d/dtPV; 1=d/dtError pid.SWM:BOOL - 0 = automatic, 1 = manual pid.MO:BOOL pid.PE:BOOL - 0=independent PID eqn; 1=dependent pid.NDF:BOOL - 0=no derivative smoothing; 1=derivative smoothing pid.NOBC:BOOL - 0=no bias calculation, 1=yes pid.NOZC:BOOL - 0=no zero crossing calculation; 1=yes pid.INI:BOOL - 0=not initialized; 1=initialized pid.SPOR:BOOL - 0=setpoint not out of range, 1=within pid.OLL:BOOL - 0=above minimum CV limit; 1=outside pid.OLH:BOOL - 0=below maximum CV limit; 1=inside pid.EWD:BOOL - 0=error outside deadband; 1=error inside pid.DVNA:BOOL - 0=ok; 1=Error is below lower limit pid.DVPA:BOOL - 0=ok; 1=Error is above upper limit pid.PVLA:BOOL - 0=ok; 1=PV is below lower limit pid.PVHA:BOOL - 0=ok; 1=PV is above upper limit
pid.SP:REAL – setpoint pid.KP:REAL - proportional gain pid.KI:REAL - integral gain pid.KD:REAL - derivative gain pid.BIAS:REAL - feed forward bias pid.MAXS:REAL - maximum scaling pid.MINS:REAL - minimum scaling pid.DB:REAL - deadband pid.SO:REAL - set output percentage pid.MAXO:REAL - maximum output limit percentage pid.MINO:REAL - minimum output limit percentage pid.UPD:REAL - loop update time in seconds pid.PV:REAL - scaled PV value pid.ERR:REAL - scaled Error value pid.OUT:REAL - scaled output value pid.PVH:REAL - process variable high alarm pid.PVL:REAL - process variable low alarm pid.DVP:REAL - positive deviation alarm pid.DVN:REAL - negative deviation alarm pid.PVDB:REAL - process variable deadband alarm pid.DVDB:REAL - error alarm deadband pid.MAXI:REAL - maximum PV value pid.MINI:REAL - minimum PV value pid.TIE:REAL - tieback value for manual control pid.MAXCV:REAL - maximum CV value pid.MINCV:REAL - minimum CV value pid.MINTIE:REAL - maximum tieback value pid.MAXTIE:REAL - minimum tieback value pid.DATA:REAL[17] - temporary and workspace (e.g. integration sums) PID CONTROL REALS