Download
1 / 21

E N D
Exercises Leviers et 2 ième condition d’équilibre
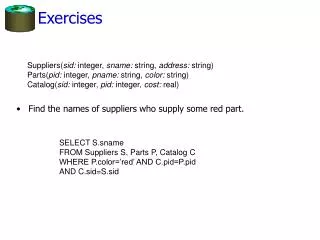
Levier • Exemple 1 : L'haltérophile québécoise Maryse Turcotte peut soulever, à l'arraché, une masse de 87,5 kg. En fournissant la même force, quelle masse est-elle capable de soulever à l'aide d'une brouette dont le centre de la cuve se situe à 60 cm de centre de la roue et dont les brancards ont une longueur de 140 cm (du centre de la roue à leur extrémité)? LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory
Exemple 1 • Données LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory
Levier • Résolution LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory
Levier • Résolution • Elle soulèveraitdonc 3 fois et demi sapropore masse. LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory
Levier • Exemple 2. Quelest le gain/avantagemécanique de l'avant-bras si la distance entre l'articulation du coude et le « point d'ancrage » du tendon du biceps est de 3 cm et si la longueur de l'avant-bras, de l'articulation au centre de la main, est de 30 cm? LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory
Levier • Résolution: • GM = AM LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory
Poulie • La poulieressembleà la roue, maiselleestpourvuesur son pourtour d'un creux (la gorge) danslequel on peut passer unecordeou un câble. LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory
Exemple • Exemple 3. Joséeemménageaujourd'huidans son premier appartement, situé au dernierétage de son immeuble. Commeelle ne veut pas monter son réfrigérateur par l'escalier en colimaçon, elleinstallesur le bord du toitunepoulie sans friction. Elle passedanscettepoulieunecordequ'elleattacheà son réfrigérateur. Avec quelle force Josée et sesamisdevront-ilstirersur la corde pour monter son réfrigérateur, d'une masse de 105 kg, àvitesseconstante? Quelleseraitcette force siJosée et sesamisadoptaientplutôt le principe de la poulie mobile? LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory
Poulie • Résulotion pour la poulie simple LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory
Poulie • Poulie mobile Danscecas, l'avantagemécaniqueest de 2 puisquedeux segments de cordesupportent le poids du réfrigérateur. LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory
Poulie mobile • Quelestl’avantagemécanique des pouliesillustrées ci-dessous? 1 2 3 4 5 LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory
Poulie mobile • Résolution 2 3 4 5 6 LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory
2ième condition d’équilibre Considérer une femme produisant une extension de son genou contre résistance fournie par un physiothérapeute. La masse de la jambe (Tibia + pied) est de 5 kg, situé au centre de la masse, qui est 12 mm en avant de l'articulation. La force de kinésithérapeute de 250 N est appliquée perpendiculairement à la jambe à une distance de 150 mm à partir de l'articulation, à un angle de 8 ° avec l'horizontale, comme illustré. Le muscle quadriceps a un bras de force = 25 mm (appliquée par le tendon rotulien à 15 ° de la verticale). Quelle est la force musculaire du quadriceps, et celles appliquées à l'articulation du genou (fémoro-tibial) pour maintenir le système force d'équilibre? LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory
2ième condition d’équilibre Résolution du DCL Rappelez-vous qu'aucune des composantes de la force à l’articulation exercent un moment de force parce que leur distance perpendiculaire à l'articulation est zéro. LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory
2ième condition d’équilibre Par conséquent, les rotations autour de l'axe Z sont positives siellessontdans le sensantihoraire. ΣMz= F muscle* dmuscle - W * DW- Fphysio * dphysio = 0 La substitution: Fmuscle* 0.025m – 5kg *9.8m/s2*0.012m – 250N * 0.150m = 0 Fmuscle = 38.088/0.025 = 1523.5N LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory
2ième condition d’équilibre Nous devonsd'abordrésoudrechaque force oblique en composants X et Y Sin(150) = Fmuscle x / Fmuscle Fmuscle x = Fmuscle * Sin(150) Similairement: Fmuscley = Fmuscle* Cos(150) Et aussi: Fphysio x = Fphysio * Cos(80) Fphysio y = Fphysio * Sin(80) LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory
2ième condition d’équilibre • Solutionons les force de contact au genou Dans la direction X: ∑Fx = Jx + 1523.5* Sin(150)-250*Cos(80)=0 Jx = -1523.5*sin(150)+250*cos(80) Jx= -39403+247.6 = -146.7N(vers la gauche) LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory
2ième condition d’équilibre • Dans la direction Y: • ∑Fy = Jy+1523.5*cos(150)-250*sin(80)+5*9.8 • Jy = -1523.5*cos(150)+250*sin(80)+5*9.8 • Jy = .1471.6+34.8+49-1387.8N(i.e. vers le bas) • Solutionons les force de contact au genou LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory
2ième condition d’équilibre • Trouvons le vecteurrésultant et son angle directeur. J=√ Jx2+Jy2 = 1395.5N tan(φ) = Fjoint x/Fjoint y = 146.7/1387.8 = 0.106 φ = 6.00 LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory
Exemple de problèmes Figure 1 LABORATOIRE DE BIOMÉCANIQUE DU MOUVEMENT HUMAIN Human Movement Biomechanics Laboratory