Download
1 / 17
170 likes | 349 Views
Institute of Scientific Computing. A Deterministic Filter for non-Gaussian State Estimation. Oliver Pajonk , Bojana Rosic, Alexander Litvinenko , Hermann G. Matthies ISUME 2011, Prag , 2011-05-03. Picture: smokeonit (via Flickr.com). Outline. Motivation / Problem Statement

E N D
Institute of Scientific Computing A Deterministic Filter for non-Gaussian State Estimation Oliver Pajonk, Bojana Rosic, Alexander Litvinenko, Hermann G. Matthies ISUME 2011, Prag, 2011-05-03 Picture: smokeonit (via Flickr.com)
Outline • Motivation / Problem Statement • State inference for dynamic system from measurements • Proposed Solution • Hilbert space of random variables (RVs) + representation of RVs by PCE a recursive, PCE-based, minimum variance estimator • Examples • Method applied to: a bi-modal truth; the Lorenz-96 model • Conclusions 3rd May 2011 | Oliver Pajonk, ISUME 2011 | A Filter for non-Gaussian State Estimation
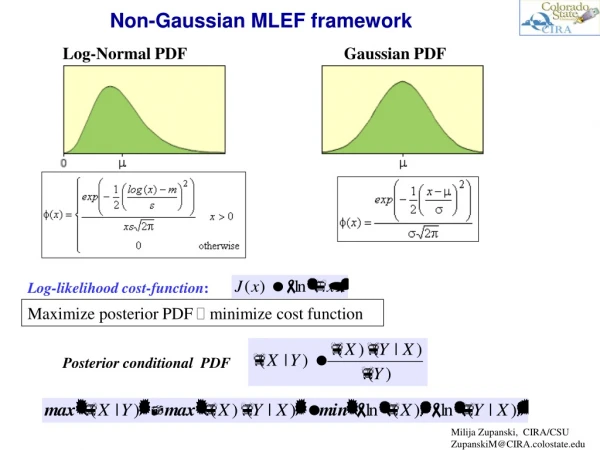
Motivation • Estimate state of a dynamic system from measurements • Lots of uncertainties and errors • Bayesian approach: Model “state of knowledge” by probabilities • New data should change/improve “state of knowledge” • Methods: • Bayes’ formula (expensive) or simplifications (approximations) • Common: Gaussianity, linearity Kalman-filter-like methods • KF, EKF, UKF, Gaussian-Mixture, … popular: EnKF • All: Minimum variance estimates in Hilbert space Question: What if we “go back there”? [Tarantola, 2004] [Evensen, 2009] 3rd May 2011 | Oliver Pajonk, ISUME 2011 | A Filter for non-Gaussian State Estimation
Outline • Motivation / Problem Statement • State inference for dynamic system from measurements • Proposed Solution • Hilbert space of random variables (RVs) + representation of RVs by PCE a recursive, PCE-based, minimum variance estimator • Examples • Method applied to: a bi-modal truth; the Lorenz-96 model • Conclusions 3rd May 2011 | Oliver Pajonk, ISUME 2011 | A Filter for non-Gaussian State Estimation
Tool 1: Hilbert Space of Random Variables [Luenberger, 1969] *Under usual assumptions of uncorrelated errors! 3rd May 2011 | Oliver Pajonk, ISUME 2011 | A Filter for non-Gaussian State Estimation
Tool 2: Representation of RVs byPolynomial Chaos Expansion (1/2) [e.g. Holden, 1996] * Of course, there are still more representations – we skip them for brevity. 3rd May 2011 | Oliver Pajonk, ISUME 2011 | A Filter for non-Gaussian State Estimation
“min-var-update”: Tool 2: Representation of RVs byPolynomial Chaos Expansion (2/2) • [Pajonk et al, 2011] 3rd May 2011 | Oliver Pajonk, ISUME 2011 | A Filter for non-Gaussian State Estimation
Outline • Motivation / Problem Statement • State inference for dynamic system from measurements • Proposed Solution • Hilbert space of random variables (RVs) + representation of RVs by PCE a recursive, PCE-based, minimum variance estimator • Examples • Method applied to: a bi-modal truth; the Lorenz-96 model • Conclusions 3rd May 2011 | Oliver Pajonk, ISUME 2011 | A Filter for non-Gaussian State Estimation
Example 1: Bi-modal Identification … 10 1 2 3rd May 2011 | Oliver Pajonk, ISUME 2011 | A Filter for non-Gaussian State Estimation
Example 2: Lorenz-84 Model [Lorenz, 1984] 3rd May 2011 | Oliver Pajonk, ISUME 2011 | A Filter for non-Gaussian State Estimation
Example 2: Lorenz-84 – Application of PCE-based updating • PCE “Proper” uncertainty quantification • Updates Variance reduction and shift of mean at update points • Skewed structure clearly visible, preserved by updates 3rd May 2011 | Oliver Pajonk, ISUME 2011 | A Filter for non-Gaussian State Estimation
Example 2: Lorenz-84 – Comparison with EnKF 3rd May 2011 | Oliver Pajonk, ISUME 2011 | A Filter for non-Gaussian State Estimation
Example 2: Lorenz-84 – Variance Estimates – PCE-based upd. 3rd May 2011 | Oliver Pajonk, ISUME 2011 | A Filter for non-Gaussian State Estimation
Example 2: Lorenz-84 – Variance Estimates – EnKF 3rd May 2011 | Oliver Pajonk, ISUME 2011 | A Filter for non-Gaussian State Estimation
Example 2: Lorenz-84 – Non-Gaussian Identification (a) PCE-based (b) EnKF 3rd May 2011 | Oliver Pajonk, ISUME 2011 | A Filter for non-Gaussian State Estimation
Conclusions & Outlook • Recursive, deterministic, non-Gaussian minimum variance estimation method • Skewed & bi-modal identification possible • Appealing mathematical properties: Rich mathematical structure of Hilbert spaces available • No closure assumptions besides truncation of PCE • Direct computation of update from PCE efficient • Fully deterministic: Possible applications with security & real time requirements • Future: Scale it to more complex systems, e.g. geophysical applications • “Curse of dimensionality” (adaptivity, model reduction,…) • Development of algebra (numerical & mathematical) 3rd May 2011 | Oliver Pajonk, ISUME 2011 | A Filter for non-Gaussian State Estimation
References & Acknowledgements • Pajonk, O.; Rosic, B. V.; Litvinenko, A. & Matthies, H. G., A Deterministic Filter for Non-Gaussian Bayesian Estimation,Physica D: Nonlinear Phenomena, 2011, Submitted for publication • Preprint: http://www.digibib.tu-bs.de/?docid=00038994 • The authors acknowledge the financial support from SPT Group for a research position at the Institute of Scientific Computing at the TU Braunschweig. • Lorenz, E. N., Irregularity: a fundamental property of the atmosphere, Tellus A, Blackwell Publishing Ltd, 1984, 36, 98-110 • Evensen, G., The ensemble Kalman filter for combined state and parameter estimation, IEEE Control Systems Magazine, 2009, 29, 82-104 • Tarantola, A., Inverse Problem Theory and Methods for Model Parameter Estimation, SIAM, Philadelphia, 2004 • Luenberger, D. G., Optimization by Vector Space Methods, John Wiley & Sons, 1969 • Holden, H.; Øksendal, B.; Ubøe, J. & Zhang, T.-S., Stochastic Partial Differential Equations,BirkhäuserVerlag, 1996 3rd May 2011 | Oliver Pajonk, ISUME 2011 | A Filter for non-Gaussian State Estimation