Download
1 / 42
420 likes | 576 Views
Competing With Nature: Smart Muscles. Mr. Alvin Quiambao , Air Force Office of Scientific Research. Group 8: Alejandra Europa, Leigh Martin, Nidia Selwyn, Jack Bobzien. Texas A&M University Chen 313 – Special Project Spring 2013.

E N D
Competing With Nature:Smart Muscles Mr. Alvin Quiambao, Air Force Office of Scientific Research Group 8: Alejandra Europa, Leigh Martin, Nidia Selwyn, Jack Bobzien Texas A&M University Chen 313 – Special Project Spring 2013 http://nanopatentsandinnovations.blogspot.com/2009/11/carbon-nanotube-artificial-muscles-for.html
Dynamic Presentation • Please visit the following link to view the dynamic version of this presentation • http://prezi.com/9w0a_pkzguey/materials_g08_smartmuscles_v03/
INTRODUCTION http://www.sciencemag.org/content/338/6109/928.full.pdf
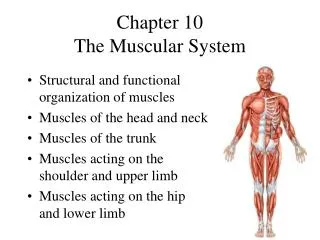
Muscle Power • A muscle is a bundle of many cells called fibers whose function is to produce force and cause motion. • Efficient at turning fuel into motion • Long-lasting • Self-healing • Able to grow stronger with practice • Basic action is contraction http://runm5.com/muscles/
Artificial Muscles • Artificial muscles are man’s attempt to duplicate, improve or simply replace the role of natural muscles • A “muscle” is anything which accomplishes actuation/contractionunder the command of a stimulus. • First artificial muscle developed in the 1950's by American physician Joseph L. McKibbenoriginally intended to actuate artificial limbs for amputees Rehabilitation glove with artificial muscles. http://we-make-money-not-art.com/archives/2004/11/the-bionic-glov.php
Motivation http://www.123rf.com/photo_4470783_an-athlete-with-a-prosthetic-leg-running-down-the-road-towards-the-ocean.html Amputations Robots Improved mechanical technology
Currently Implemented http://www.bio-pro.de/magazin/thema/00172/index.html?lang=en&artikelid=/artikel/02311/index.html • Mechanical artificial muscles are contractile or extensional devices operated by pressurized air filling a pneumatic bladder, using motors or hydraulics
Alternatives http://www.proftec.com/research-watch/wax-infused-nanoyarn-used-to-create-artificial-muscles/ • A shape-memory alloyis an alloy that "remembers" its original, cold-forged shape: returning to it when heated. • Electroactive Polymers, or EAPs, are polymers that exhibit a change in size or shape when stimulated by an electric field. • Dialectric Elastomer • IMPC’s • Carbon Nanotubes
BASIC PRINCIPLES Contraction & Expansion of the Natural Muscle http://www.youtube.com/watch?v=Q9wRTIZIBy K
MUSCLES • Muscles are the "engine" that your body uses to propel itself. • Turn energy into motion. • Contractions of muscles are triggered by electrical impulses or a stimulus • Nerve cells • Internal or external stimuli Triggered nerve cells. http://brainandspine.titololawoffice.com/tags/neuroscience/
NATURAL MUSCLES • Long-lasting and Self-healing • Grow stronger with repetitive use • Allows for work cycles of more than 20% • Alter strength and stiffness when needed • Generate stresses up to about .35 MPa • Contract at 50% per second • Can transform ATP into fuel, if needed http://www.predatornutrition.com/blog/wp-content/uploads/2012/03/contracting-muscles.jpg
Artificial Muscles • Materials that change size and shape when activated by a stimulus • Mimic natural body functions • Provide large force and motion while being lightweight and not very dense • Allow for more delicate movements than machines can achieve Early McKibben Arm Muscle of a Rubber Tube http://cyberneticzoo.com/?m=201204
CURRENT TECHNOLOGY http://www.sciencephoto.com/media/280066/view
History • External, lower-extremity orthotic and prosthetic (O&P) devices have been around for centuries • Made from crude materials • Wood and leather • Heavy, non-adaptive, and difficult to use • 1970s: Actively controlled knee dampers • Advantage over mechanically passive knee systems • More control & stability • Recently: Computer-controlled adaptive knee orthotic • Offers only locking and unlocking controllability Prosthetic toe: 950 and 710 B.C. This prosthetic toe dates back to between 950 and 710 B.C. http://science.howstuffworks.com/prosthetic-limb1.htm
History • 1988:Popovicand Schwirtlich • Amputees using a powered knee prosthesis could walk at faster speeds • Improved metabolic economy compared to conventional knees • Knee design was never commercialized • Problems occurred with the mechanical system • Inadequate cycle life • Excessive mechanism noise • Limited battery life http://proklinik.com.tr/en/prosthetics/lower-extremity/microprocessor-knees/power-knee/
Current Devices • Contemporary O&P limbs cannot yet perform as well as their biological counterparts, • Stability • Power generation • Efficiency • Cycle life • Current prosthetic and orthotic devices are separate, lifeless mechanisms • Robotic limbs are bulky and do not yet mimic the natural movement of the body • Devices today have no real neurological or intimate connection with the human body http://commons.wikimedia.org/wiki/File:US_Navy_110811-N-DM186-076_A_Navy_Hospital_Corpsman_from_Wounded_Warriors_Battalion_West_shows_his_prosthetic_leg_during_a_halftime_presentation_at.jpg
Issues • Most devices in use today employ a force- controllable actuator • Comprised of an electric motor and a mechanical transmission • Heavy, bulky, and noisy mechanism • Lower-extremity O&P devices cannot modulate spring stiffness and motive force needed for normal leg movement • Fit/Sizing • Balance • Easily fatigued http://www.georgiaprosthetics.net/whats-new?offset=80&max=5
Solution • The actuator and transmission play a dominant role in determining the dynamic performance of O&P devices • In trying to duplicate the form and function of a limb, actuators that are similar to natural muscle are needed • Desired changes: • Lighter • Simpler • More natural looking • Quiet operation • Comfortable attachment • Lower cost http://www.medgadget.com/2012/11/new-integrated-approach-to-help-improve-control-of-prostheses-video.html
Solution • For artificial appendages to truly mimic biological function, even during level ground ambulation, O&P actuators must control both joint impedance and motive force • Artificial muscles offer considerable advantages to the physically challenged, allowing for • joint impedance • Motive force controllability • Noise-free operation http://ndeaa.jpl.nasa.gov/nasa-nde/nde-aa-l/clipping/Scientific-Ameican-article-Oct-03.pdf
CURRENT RESEARCH Picture taken from Clip Art
Properties Needed • Generate large strains rather than high force • Fractional changes of muscle length • ~ 20 % • High response rate • High output power at low strain http://eap.jpl.nasa.gov/
How can this be accomplished? • Do not want to mimic nature • Large macroscopic strains • Combining effects of trillions of molecular actuators • Take advantage of material deformations • Different types exist • Use distinct actuators / driving factors Different contractions levels of an air muscle designed by the Schadow Robot Company. http://lucy.vub.ac.be/gendes/actuators/muscles.htm
Shape Memory Alloys • Electroactive Polymers • Dielectric Elastomers • IPMCs • Carbon Nanotubes Types of Actuators Taken from Clip Art
Shape-Memory Alloys • Commercially important • Generate strains of up to 8% • Require energy conversion • Electrical thermal mechanical • Inefficient Shape-Memory Alloy http://www.grc.nasa.gov/WWW/RT/2003/5000/5120noebe.html
Problems • All previously mentioned artificial muscles provide high-strain • But all have a disadvantage • Inefficient energy conversion • Low response rate • High voltages • Etc. • Need for a new design http://www.talkingelectronics.com/projects/Nitinol/Nitinol-1.html
Electroactive Polymers EAPs • Exhibit change in size or shape when exposed to an electric field • Use electronically conducting polymers • Polyaniline and polypyrrole • High-strain actuators http://www.hizook.com/blog/2009/12/28/electroactive-polymers-eap-artificial-muscles-epam-robot-applications
EAPs • Solvated dopant ions inserted into a conducting-polymer electrode • Similar to a battery • Operate at a few volts • Generates high strains: 26% • High strain rates: 11%/sec • Large stresses: 7 to 34 MPa (a) EAP gripping device.(b) A voltage is applied and the EAP fingers deform in order to surround the ball.(c) When the voltage is removed the EAP fingers return to their original shape and grip the ball. http://en.wikipedia.org/wiki/Electroactive_polymers
Videos Electroactive Polymer for a Robot Head http://www.hizook.com/blog/2009/12/28/electroactive-polymers-eap-artificial-muscles-epam-robot-applications
Dielectric Elastomers • One type of EAP • Resemblance to silicone rubbers in sealants • Considered a capacitor • Better than a battery • Used by Artificial Muscle Inc. Dielectric Elastomer Compresses with applied voltage http://mecha.skku.ac.kr/board/list.php?bbs_id=soft01
Dielectric Elastomers • Driven by Maxwell Stress • Attraction between charges of opposite capacitor electrodes • Repulsion between like charges • High strains: 120% • Large stresses: 3.2 MPa • Peak strain rate: 34,00% / sec for 12% strain http://www.shalab.phys.waseda.ac.jp/chemical-e.html
Problems & Limitations • As elastomerstiffness decreases, maximum stress generation decreases • Maximum actuator stroke and work-per-cycle increases • Main limitation • High operating voltage needed
IPMC’s • Ionic polymer/metal composite actuator • Amplifies low strains using the cantilever effect • Environmental Robots Inc. • Two metal-nanoparticle electrodes • Filled & separated with a solid electrolyte EAP Bending www.intechopen.com
IPMC’s • Actuators act as super capacitors • Applied electrode potential injects electronic charges into the high surface area electrodes • Solvated ions migrate between the electrodes • One electrode expands IPMC for sting ray robot - Motion under water www.intechopen.com
Performance • Tensile strength of 40% • Actuation results from a local pH change cause by electrolysis of the electrolyte and transport of ions • Limitations • Low actuation rate • Low energy conversion efficiency
Carbon Nanotubes Artificial Muscles • Low voltage • Low-strain actuators • Use electrochemical charge injection into nanostructured electrode • Electrostatically driven electrode expansion http://woomyoung.co.kr/products.htm?code=10200000
How it works • Yarns made from sheets of carbon nanotubes • Solid guest or filler material in between • Replacing liquid electrolytes • Melting and solidifying the wax twists or untwist the yarn • Generation of motion • Actuated by heating http://phys.org/news/2011-10-carbon-nanotube-muscles-giant-motors.html
How it works • Heat causes a phase transition and volume expansion of wax • Yarn provides good electrical conductivity • Control of heating and actuation http://www.sciencemag.org/content/338/6109/928/F1.expansion.html
Performance • 100 times the stress of natural muscles • Comparable actuation rates • Actuator strain is at best 2% • Outperforms existing muscles • Allows for linear and rotary motions Bundle of Carbon Nanotubes http://www.sciencedirect.com/science/article/pii/S0921452606019314
Limitations • Lacks biocompability • To replace biological muscle • Forces generated are limited • Need to keep the wax within the yarn • Tensile strength of the yarn material • Needs better constrain of volume expansion • Few defects can reduce strength • Can be fixed with thermal annealing Performance of carbon nanotubes http://www.sciencedirect.com/science/article/pii/S0921452606019314
CONCLUSIONS Carbon nanotubes have the brightest future in the artificial muscle world. It allows for the largest variety of movement while maintaining a high durability. http://www.sciencemag.org/content/338/6109/928.full.pdf
Future • Very advanced technology but still behind • Nature provides high-strain muscles • Things to remember: • Fuel cells provide more power than batteries • Need to optimize synthesis conditions of carbon nanotubes: longer • Compatibility • Use same fuel and fuel delivery system as natural muscles http://www.wired.com/wiredscience/2009/03/nanomuscle/
SOURCES • Electrically, Chemically, and Photonically Powered Torsional and Tensile Actuation of Hybrid Carbon Nanotube Yarn Muscles. MárcioD. Lima et al. Science 338, 928 (2012); http://www.sciencemag.org/content/338/6109/928.full.pdf • Speeding Up Artificial Muscles. Mark Schulz. Science 16 November 2012: 338 (6109), 893-894. http://www.sciencemag.org/content/338/6109/893.full.pdf • Playing Nature's Game with Artificial Muscles. Ray H. Baughman. Science 1 April 2005: 308 (5718), 63-65. http://www.sciencemag.org/citmgr?gca=sci;308/5718/63 • Torsional Carbon Nanotube Artificial Muscles. JavadForoughi. et al. Science 28 October 2011: 334 (6055), 494-497. http://www.sciencemag.org/citmgr?gca=sci;334/6055/494