Download
1 / 21
210 likes | 386 Views
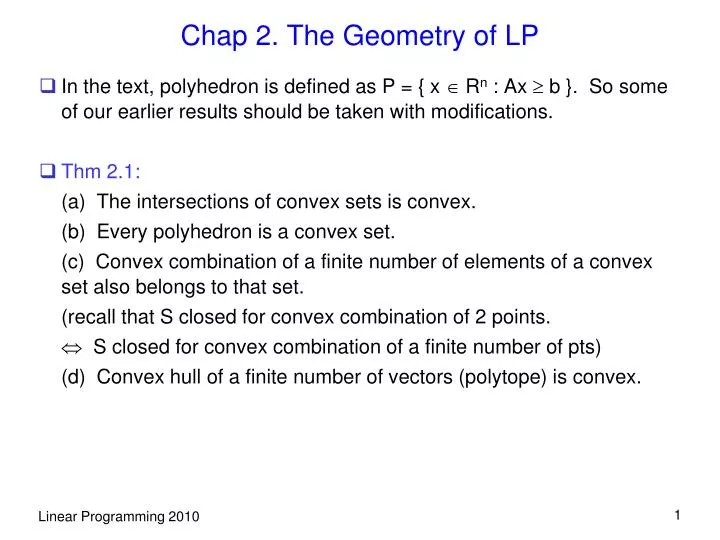
Chap 2. The Geometry of LP. In the text, polyhedron is defined as P = { x R n : Ax b }. So some of our earlier results should be taken with modifications. Thm 2.1: (a) The intersections of convex sets is convex. (b) Every polyhedron is a convex set.

E N D
Chap 2. The Geometry of LP • In the text, polyhedron is defined as P = { x Rn : Ax b }. So some of our earlier results should be taken with modifications. • Thm 2.1: (a) The intersections of convex sets is convex. (b) Every polyhedron is a convex set. (c) Convex combination of a finite number of elements of a convex set also belongs to that set. (recall that S closed for convex combination of 2 points. S closed for convex combination of a finite number of pts) (d) Convex hull of a finite number of vectors (polytope) is convex.
Pf) (a) Let x, y iI Si , Si convex x, y Si , i x + (1-)y Si i since Si convex x + (1-)y iI Si , Si convex. (b) Halfspace { x : a’x b } is convex. P = halfspaces From (a), P is convex ( or we may directly show A( x + (1-)y ) b. ) (c) Use induction. True for k = 2 by definition. Suppose statement holds for k. Suppose k+1 1. Then i=1k+1 ixi = k+1xk+1 + (1-k+1) ( i=1k ( i / (1-k+1)) xi ) i / (1-k+1) 0 and sum up to 1, hence i = 1k ( i / (1-k+1)) xi S. i = 1k+1 ixi S. (d) Let S be the convex hull of vectors x1, … , xk and y, z S y = i=1k ixi , z = i=1k ixi for some i , i y + (1-)z = ixi + (1-) ixi = i=1k (i +(1-)i) xi i +(1-)i 0 and sum up to 1 convex comb. of xi y + (1-)z S.
Extreme points, vertices, and b.f.s’s • Def: (a) Extreme point ( as we defined earlier) (b) x P is a vertex if c Rn such that c’x < c’y y P and y x. ( x is unique optimal solution of min c’x, x P ) (c) Consider polyhedron P and x* Rn. Then x* is a basic solution if all equality constraints are active at x* and n linearly independent active constraints among the constraints active at x*. ( basic feasible solution if x* is basic solution and x* P ) • Note: Earlier, we defined the extreme point same as in the text. Vertex as 0-dimensional face ( dim (P) + rank (A=, b=) = n ) which is the same as basic feasible solution in the text. We defined basic solution (and b.f.s) only for the standard LP. ( xB = B-1b, xN = 0 ) Definition (b) is new. It gives an equivalent characterization of extreme point. (b) can be extended to characterize a face F of P.
x3 • Fig. 2.6: P = { (x1, x2, x3): x1+x2+x3 = 1, x1, x2, x3 0} Three constraints active at A, B, C, D. Only two constraints active at E. Note that D is not a basic solution since it does not satisfy the equality constraint. However, if P is denoted as P = { (x1, x2, x3): x1+x2+x3 1, x1+x2+x3 1, x1, x2, x3 0}, D is a basic solution by the definition in the text, i.e. whether a solution is basic depends on the representation of P. x2 A C P E D x1 B
Fig. 2.7: A, B, C, D, E, F are all basic solutions. C, D, E, F are basic feasible solutions. A E D P F B C
Thm 2.3: x* P, then x* vertex, extreme point, and b.f.s. are equivalent statements. Pf)We follow the definitions given in the text. We already showed in the notes that extreme point and 0-dimensional face ( AIx* = bI, AI : rank n, b.f.s. in the text) are equivalent. To show all are equivalent, take the following steps: x* vertex (1) x* extreme point (2) x* b.f.s. (3) x* vertex (1) x* vertex x* extreme point Suppose x* is vertex, i.e. c Rn such that x* is unique min of min c’x, x P. If y, z P, y, z x*, then c’x* < c’y and c’x* < c’z. Hence c’x* < c’( y + (1-)z ), 0 1 y + (1-)z x* Hence x* cannot be expressed as convex combination of two other points in P x* extreme point.
(continued) (2) x* extreme point x* b.f.s. Suppose x* is not a b.f.s.. Let I = { i : ai’x* = bi } Since x* is not a b.f.s., the number of linearly independent vectors ai in I < n. Hence nonzero d Rn such that ai’d = 0, i I. Consider y = x* + d, z = x* - d. But, y, z P for sufficiently small positive , and x* = (y+z)/2, which implies x* is not an extreme point. (3) x* b.f.s. x* vertex Let x* be a b.f.s. and let I = { i : ai’x* = bi } Let c = iI ai . Then c’x* = iI ai’x*= iI bi x P, we have c’x = iI ai’x iI bi = c’x*, hence x* optimal. For uniqueness, equality holds ai’x = bi , i I. Since x* is b.f.s., it is the unique solution of ai’x = bi , i I Hence x* is a vertex.
Note: Whether x* is a basic solution depends on the representation of P. However, x* is b.f.s. iff x* extreme point and x* being extreme point is independent of the representation of P. Hence the property of being a b.f.s. is also independent of the representation of P. • Cor 2.1: For polyhedron P , there can be finite number of basic or basic feasible solutions. • Def: Two distinct basic solutions are said to be adjacent if we can find n-1 linearly independent constraints that are active at both of them. ( In Fig 2.7, D and E are adjacent to B; A and C are adjacent to D.) If two adjacent basic solutions are also feasible, then the line segment that joins them is called an edge of the feasible set ( one dimensional face).
2.3 Polyhedra in standard form • Thm 2.4: P = { x : Ax = b, x 0 }, A: m n, full row rank. Then x is a basic solution x satisfies Ax = b and indices B(1), … , B(m) such that AB(1), … , AB(m) are linearly independent and xi = 0, i B(1), … , B(m). Pf) see text. ( To find a basic solution, choose m linearly independent columns AB(1), … , AB(m). Set xi = 0 for all i B(1), … , B(m), then solve Ax = b for xB(1), … , xB(m). ) • Def: basic variable, nonbasic variable, basis, basic columns, basis matrix B. (see text) ( BxB = b xB = B-1b )
Def: For standard form problems, we say that two bases are adjacent if they share all but one basic column. • Note: A basis uniquely determines a basic solution. Hence if have two different basic solutions have different basis. But two different bases may correspond to the same basic solution. (e.g. when b = 0 ) Similarly, two adjacent basic solutions two adjacent bases Two adjacent bases with different basic solutions two adjacent basic solutions. However, two adjacent bases only not necessarily imply two adjacent basic solutions. The two solutions may be the same solution.
Check that full row rank assumption on A results in no loss of generality. • Thm 2.5: P = { x : Ax = b, x 0 } , A : m n, rank is k < m. Q = { x : AIx = bI, x 0 }, I = { i1, … , ik } with linearly indep. rows. Then P = Q. Pf) Suppose first k rows of A are linearly independent. P Q is clear. Show Q P. Every row ai’ of A can be expressed as ai’ = j=1k ijaj’. Hence, for x P, bi = ai’x = j=1k ij aj’x = j=1k ij bj , i = 1, … , m i.e. bi is also linear combination of bj , j I. Suppose y Q, then i = 1, … , m, ai’y = j=1k ij aj’y = j=1k ij bj = bi Hence, y P Q P
2.4 Degeneracy • Def 2.10: A basic solution x Rn is said to be degenerate if more than n of the constraints are active at x. • Def 2.11: P = { x Rn: Ax = b, x 0 }, A: m n, full row rank. Then x is a degenerate basic solution if more than n – m of the components of x are 0 ( i.e. some basic variables have 0 value) • For standard LP, if we have more than n – m variables at 0 for a basic feasible solution x*, it means that more than n – m of the nonnegativity constraints are active at x* in addition to the m constraints in Ax = b. The solution can be identified by defining n-m nonbasic variables ( value = 0). Hence, depending on the choice of nonbasic variables, we have different bases, but the solution is the same.
Fig 2.9: A and C are degenerate basic feasible solutions. B and E are nondegenerate. D is a degenerate basic solution. A D C P B E
Fig 2.11: (n-m)-dimensional illustration of degeneracy. Here, n=6, m=4. A is nondegenerate and basic variables are x1, x2, x3, x6. B is degenerate. We can choose x1, x6 as the nonbasic variables. Other possibilities are to choose x1, x5, or to choose x5, x6. A x4=0 x3=0 B x5=0 P x1=0 x6=0 x2=0
Degeneracy is not purely geometric property, it may depend on representation of the polyhedrom ex) P = { x : Ax = b, x 0 }, A: m n P’ = { x : Ax b, -Ax -b, x 0 } We know that P = P’, but representation is different. Suppose x* is a nondegenerate basic feasible solution of P. Then exactly n – m of the variables xi* are equal to 0. For P’, at the basic feasible solution x*, we have n – m variables set to 0 and additional 2m constraints are satisfied with equality. Hence, we have n + m active constraints and x* is degenerate.
2.5 Existence of extreme points • Def 2.12: Polyhedron P Rncontains a line if a vector x P and a nonzero d Rn such that x + d P for all R. Note that if d is a line in P, then A(x + d) b for all R Ad = 0 Hence d is a vector in the lineality space S. ( in P = S+K+Q ) • Thm 2.6: P = { x Rn: ai’x bi, i = 1, … , m } , then the following are equivalent. (a) P has at least one extreme point. (b) P does not contain a line. (c) n vectors out of a1, … , am, which are linearly independent. Pf) see proof in the text.
Note that the conditions given in Thm 2.6 means that the lineality space S = {0} • Cor 2.2: Every nonempty bounded polyhedron (polytope) and every nonempty polyhedron in standard form has at least one basic feasible solution (extreme point).
2.6 Optimality of extreme points • Thm 2.7: Consider the LP of minimizing c’x over a polyhedron P. Suppose P has at least one extreme point and there exists an optimal solution. Then there exists an optimal solution which is an extreme point of P. Pf) see text. • Thm 2.8: Consider the LP of minimizing c’x over a polyhedron P. Suppose P has at least one extreme point. Then, either the optimal cost is - , or there exists an extreme point which is optimal.
(continued) Idea of proof in the text) Consider any x P. Let I = { i : ai’x = bi } Then we move to y = x + d, where ai’d = 0, i I and c’d 0. Then either the optimal cost is - ( if the half line d is in P and c’d < 0 ) or we meet a new inequality which becomes active ( cost does not increase). By repeating the process, we eventually arrive at an extreme point which has value not inferior to x. Therefore, for any x in P, there exists an extreme point y such that c’y c’x. Then we choose the extreme point which gives the smallest objective value with respect to c.
( alternative proof of Thm 2.8) P = S + K + Q. Pointedness of P implies S = {0}. Hence x P x = i qidi + j rjuj , where di’s are extreme rays of K and uj’s are extreme points of P and qi 0, rj 0, j rj = 1. Suppose i such that c’di < 0, then LP is unbounded. ( For xP, x + di P for 0. Then c’( x+di ) - as ) Otherwise, c’di 0 for all i , take u* such that c’u* = minj c’uj Then x P, c’x = i qi(c’di) + j rj(c’uj) j rj(c’uj) (c’u*) j rj = c’u*. Hence LP is either unbounded or an extreme point of P which is an optimal solution. Proof here shows that the existence of an extreme ray di of the pointed recession cone Ax 0 ( if have min problem and polyhedron is Ax b) such that c’di < 0 is the necessary and sufficient condition for unboundedness of the LP. ( If P has at least one extreme point, then LP unbounded an extreme ray di in recession cone K such that c’di < 0)