Download
1 / 26

E N D
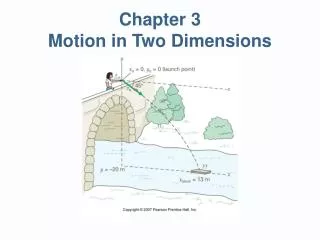
Chapter 3Motion in Two Dimensions Most interesting kinematics problems occur in two dimensions (or three, but the extension from 2D to 3D is fairly simple). As it turns out, our 1D equations from chapter 2 are still extraordinarily useful in solving 2D and 3D problems. In this chapter, we will see how this is accomplished. It will require the use of vectors – and in particular, the component notation of vectors. Make sure that you are comfortable with the use of vectors – it’s the most difficult mathematical concept that you will encounter in PC141.
3.0 Review of Trigonometry A trig “refresher” can be found in Appendix 1D of the text. The most important concepts are shown here, and will be discussed in class.
3.0 Review of Trigonometry Angles – reference point and units Unless otherwise specified, angles are measured relative to the positive direction of the x-axis. They are positive if they are measured in the counterclockwise direction and negative if they are measured in the clockwise direction. Angles may be measured in degrees or radians (rad). To convert between these units, recall that a full circle is 360° or 2π rad. For example, to convert 40° into radians, write When using a calculator, always be aware of whether it is in “degrees” mode or “radians” mode. Advanced scientific computation software (MasteringPhysics, in particular) almost always uses the latter by default.
3.0 Review of Trigonometry Inverse trig functions The inverse trig functions sin-1 x, cos-1x, and tan-1 xare not equal to 1/(sin x), 1/(cosx), 1/(tan x), respectively. Rather, this notation indicates that you must invert the operation of the trig function itself; for example, y = sin ximplies that x = sin-1 y. The function sin-1 x is called the “arcsine” of x (similarly, we have the “arccosine”, “arctangent”, “arccosecent”, etc.) In the unlikely case that you need to need to use an inverse trig function in MasteringPhysics, the preferred syntax is “acos”, “asin”, etc.
3.0 Review of Trigonometry Inverse trig functions Note however that there are an infinite number of solutions of the inverse trig functions, two for each 2π rotation around a circle. For instance, sin-1 0.5 has the solutions 30° and 150°. Your calculator will only give you the first of these. Deciding if the calculator’s answer makes sense is one reason why it is strongly suggested that you sketch a diagram that represents the problem you are wishing to solve. Later in this chapter, we will come across this issue in one of the problems that we will solve. 0.5 150° 30°
3.1 Components of Motion In chapter 2, we assumed that objects moved in straight lines (although they could move back and forth along these lines). These lines were labeled as the x- or y-axes (for horizontal and vertical lines, respectively). If an object moves in a straight line that is at an angle to these axes, it’s still a 1D problem…we are free to reorient our axes in any direction we wish. For example, if an object is sliding downhill, it is usually beneficial to orient your axes as shown to the right.
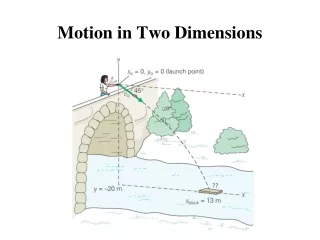
3.1 Components of Motion However, we are frequently called upon to analyze problems in which an object undergoes curvilinear motion – that is, its trajectory does not follow a straight line. The Angry Birds depicted on the title slide for this chapter is an example. On the other hand, a situation might arise where multiple objects are moving in straight lines that aren’t parallel or perpendicular to each other. In both of these cases, we must describe the motion in more than one dimension.
3.1 Components of Motion In the figure on the previous slide, the ball is moving in a direction θ with respect to the +x-direction, and with a velocity of magnitude v. It can be thought of as having velocity components in both the x-direction and the y-direction. These are labeled vx and vy, respectively. Since the x-axis and y-axis are perpendicular, simple trigonometry allows us to resolve the velocity vector into its scalar components: On the other hand, if we know vx and vy, we can find the magnitude and angle of the velocity using Pythagoras’s theorem and a bit more trigonometry: ,
3.1 Components of Motion The benefit of using component notation for vectors is that a2D kinematics problem can be converted into two 1D kinematics problems. These problems are solved individually using the methods of the last chapter, then combined at the end if necessary. For instance, in the case of a constant acceleration a with components and , we can write Here, and are the velocity components at t = 0. motion in x motion in y
Problem #1: Curvilinear Motion WBL LP 3.3
Problem #1: Curvilinear Motion WBL LP 3.3
Problem #2: Rolling Ball WBL EX 3.9 A ball rolling on a table has a velocity with rectangular components vx = 0.60 m/s and vy= 0.80 m/s. What is the displacement of the ball in an interval of 2.5 s? Solution: In class
Problem #3: Particle Acceleration WBL EX 3.13 A particle moves at a speed of 3.0 m/s in the +x-direction. Upon reaching the origin, the particle receives a continuous constant acceleration of 0.75 m/s2 in the – y-direction. What is the position of the particle 4.0 s later? Solution: In class
3.2 Vector Addition and Subtraction We will use boldface and over-arrows () to indicate vectors. On pp. 73-74 of the text, the geometrical method of vector addition is explained. This method is sometimes useful for checking the “reasonableness” of your answer to 2D problems. However, it is almost always better to perform vector addition and subtraction using component notation.
3.2 Vector Addition and Subtraction To perform vector addition and subtraction using component notation, we must introduce the unit vector. A unit vector has a particular direction, but it always has a magnitude of one (in whatever units are appropriate). In our text, it is notated using lower-case boldface and a hat. That is, the unit vector corresponding to is . Any vector can then be expressed as the product of its magnitude and its unit vector: . If we define and as unit vectors in the x- and y-directions, then any vector in the xy-plane can be written as .
3.2 Vector Addition and Subtraction To add vectors using component notation, we simply resolve the vectors into their components and add the components for each axis separately. For example, consider two vectors: and . Their sum is . Since each component of must equal the corresponding component of +, we can write
3.2 Vector Addition and Subtraction Vector subtraction works the same way as scalar subtraction. If you have two scalars, a and b, their difference is a – b = a + (-b) Likewise, the difference of two vectors and is , where is a vector with the same magnitude as , but with the opposite direction.
3.2 Vector Addition and Subtraction For 3D problems, almost everything we’ve learned in two dimensions can still be applied. For example, if an object is moving in three dimensions, its velocity has x-, y-, and z-components: . Its magnitude is (Pythagoras’ equation works just fine in higher dimensions). The concept of angles becomes much more complicated in 3D – it’s ignored in PC141.
3.2 Vector Addition and Subtraction Three final notes: • The process of decomposing 2D and 3D problems into separate 1D problems will be utilized repeatedly during PC141, so I strongly suggest that you get comfortable with it now. • We have seen that for 2D problems occurring in a vertical plane, we use x to label the horizontal axis and y to label the vertical axis. When dealing with 3D problems, it is customary to use x and y to represent the two horizontal axes and z to represent the vertical axis.
3.2 Vector Addition and Subtraction • For problems referenced to a map, it is customary for the +x-axis to point east, the +y-axis to point north, and the +z-axis to point upward. The term “northeast” means exactly northeast…that is, at 45 degrees to both x and y(and similarly for “northwest”, etc.). The term “north of east” is a more vague term referring to the first quadrant (where the x- and y-coordinates are both positive) “northeast” “south of east”
Problem #5: Doppler Radar WBL EX 3.39
Problem #5: Doppler Radar WBL EX 3.39
Problem #6: Terrible Golfer A golfer must make just one putt to win the Masters. The hole is 10.0 m away (assume that the green is perfectly flat). The putt is terrible…it’s off by 20° (to the right of the hole) and it travels 14.0 m. If the 2nd putt is to be accurate, how far should it travel? In what direction should it travel, relative to the true alignment of the initial putt? Solution: In class
Problem #7: Zero-Sum Vectors WBL EX 3.43 Two vectors are shown in the figure, with magnitudes F1 = 100 and F2= 150. A third vector (not shown) must be found such that the sum of all three vectors is the zero vector. What is this third vector? Solution: In class Note: This concept of “vector balancing” is very important in mechanics, when the vectors are forces. We’ll get to that in Chapter 4.
Problem #8: Mountain Climber A mountaineer uses a global positioning system (GPS) receiver to measure his displacement from base camp to the summit of Mt. McKinley. The coordinates of the base camp are x = 0 m, y = 0 m, and z = 4300 m, where z represents altitude. The coordinates of the summit are x = 1600 m, y = 4200 m, and z = 6200 m. What is the magnitude of the displacement in going from the base camp to the summit? Solution: In class