Download
1 / 19
190 likes | 331 Views
Robotics II Planning and Manipulation. Jeff Trinkle MRC 330c TA: Blake Farman. Robotics I Topics. Spatial description (Craig chapter 2) Manipulator kinematics (Craig chapter 3) Inverse manipulator kinematics (Craig chapter 4) Manipulator Jacobians (Craig chapter 5)

E N D
Robotics IIPlanning and Manipulation Jeff Trinkle MRC 330c TA: Blake Farman
Robotics I Topics • Spatial description (Craig chapter 2) • Manipulator kinematics (Craig chapter 3) • Inverse manipulator kinematics (Craig chapter 4) • Manipulator Jacobians (Craig chapter 5) • Manipulator dynamics (Craig chapter 6) • Linear control (Craig chapter 9) • Nonlinear control (Craig chapter 10) • Force control (Craig chapter 11)
Robotics II Topics • Grasping – (Chapter 28 from Springer Handbook of Robotics, 2008) • If necessary – Trajectory Planning (Craig chapter 7) • Motion Planning (LaValle Chapters 1-6) • Piano mover’s problem • Moving a robot arm among obstacles • Manipulation Planning • Multibody dynamics • Motion planning + physical constraints • Device Design • Variation on manipulation planning • Other current topics – probably from recent publications • Robot programming (Craig chapter 12 or papers) • tbd…
Trajectory Planning with Geometric and Physical Model • Surface geometry • Paint deposition physics
Manipulation Planning State of the Art? • Human vs Robot
Household Robotics • Kuffner et al. • Robotics: Science and Systems 2008
Grasp Acquisition Success Rate Failures • Parallel jaw gripper grasping a lock part • 100,800 trials • Slow or fast • Clean or sandy Success Brost and Christiansen, 1995
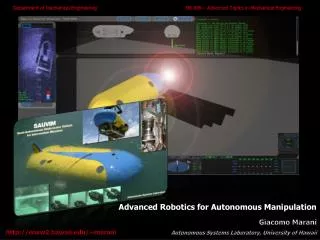
More Manipulation Examples • Ram’s planner • Kaneko’s hands http://www.k2.t.u-tokyo.ac.jp/index-e.html • Koditschek’s HRex
Parts-Feeder Design Design Goals: 1) All pegs exit closed end down 2) Maximize through-put?? Solved without simulation Boothroyd (1960’s)
Experimental Validation • Experimental test bed developed in GRASP Lab with Song, Pang, and Kumar
Fixture plate holding pawl Human Meso-Scale Assembly with Jones and Kozlowsky (2004)
Automated Meso-Scale Assembly • Insertion planned using: • LaValle’s Rapidly-Exploring Dense Trees (RDTs) • dVC for simulation http://www.robotics.cs.rpi.edu/dvc/ • Execution open loop • Closed-loop execution possible with detailed, pre-computed RDT with Cappelleri, et al. 2006
Solving the Peg-in-Hole Problem • Estimate surface friction model • Use RDT with Cappelleri, et al. 2006
Analytical Design of Vibratory Manipulation • Manipulate small parts in parallel • Control gross motion with “asymptotic velocity fields” • Generated by periodic support surface trajectories that bias the net friction force Vose, Umbanhower, and Lynch, 2007
Computational Design of Vibratory Manipulation • Vose received RSS 2008 best student paper award ($2,500)! • Six speakers coupled to plate generate desired plate vibration with Berard, Nguyen, and Anderson
Practical Details • TA is Blake Farman (farmab@rpi.edu) • Main responsibilities: • dVC from RPI • OOPSMP (Oops Motion Planner?!) from Rice • Office MRC 332 • Office hours: • 8pm to 10pm Mondays and Thursdays • Also by appointment • Other possiblilities (W all day; T,F after 5pm) • Trinkle (trinkj@rpi.edu) • Office MRC 330c • Office hours: • 3pm to 4pm (or by appointment) • Also by appointment
First Assignment • Install dVC-3D • Before class on Friday (1/16), install Qt (http://www.qtsoftware.com/) • Blake will be available: • Via email farmab@rpi.edu • In office – but contact first to make sure • Friday in class • Install dVC-3D • Linux or visual studio
Dogs can Plan Complex Tasks Too Dynamics Intermittent contact Nonholonomic constraints Nonlinear control