Download
1 / 175
1.76k likes | 2.09k Views
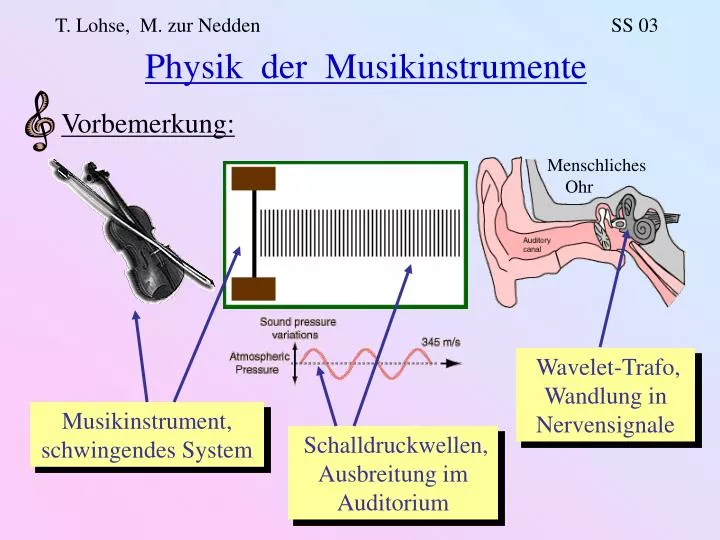
T. Lohse, M. zur Nedden. SS 03. Menschliches Ohr. Wavelet-Trafo, Wandlung in Nervensignale. Musikinstrument, schwingendes System. Schalldruckwellen, Ausbreitung im Auditorium. Physik der Musikinstrumente. Vorbemerkung:. Physikalische Grundlagen:

E N D
T. Lohse, M. zur Nedden SS 03 Menschliches Ohr Wavelet-Trafo, Wandlung in Nervensignale Musikinstrument, schwingendes System Schalldruckwellen, Ausbreitung im Auditorium Physik der Musikinstrumente Vorbemerkung:
Physikalische Grundlagen: • Schwingungen / Wellen in festen / gasförmigen elastischen Medien • Hydrodynamik • Lineare und nichtlineare Schwingungen • Beispiele schwingender Systeme: • Saiten Geige, Gittarre, Klavier, ... • Blattfedern Rohr / Zunge in Blasinstrumenten, ... • Membranen Pauke, Bongos, Trommelfell, ... • Platten, Stäbe Xylophon, Gitarrendeckel, Triangel, ... • Schalen Becken, Glocke, ... • Luft-Hohlraumresonatoren Geigenkörper, Orgelpfeife, ... • Luft-Wellenleiter Flöte, Trompete, Horn, ...
Bewegungsgleichung: komplexe Lösung: ω0: Eigenfrequenz A = |A|·eiφ:komplexe Amplitude φ:Phase reelle (physikalische) Lösung: Anfangsbedingungen |A|, φ bzw. a, b 1. Schwingende Systeme 1.1. Eindimensionale harmonische Schwingung
L m D I Q z C S Schallgeschwindigkeit L Beispiele: Helmholtz-Resonator:
aperiodischer Grenzfall α = ω0: 1.2. Dämpfung Bewegungsgleichung: α: Dämpfungskonstante α < ω0:Schwingfall (musikalischer Normalfall) α > ω0:Kriechfall
R L I D Q m C γ Beispiele: z Musikinstrumente: „Kleine Dämpfung“ α ω0 quasi-statische Schwingung / kein Energieverlust während T = 2π / ω
½ const. Güte: Energieverlust bei kleiner Dämpfung: Dämpfungszeit: #Schwingungen in τD:
Güte: T14% = Q/2π = 4τD T37% = Q/π = 2τD Impulsanregung Beispiel:
1.3. Erzwungene Schwingungen z D F(t) γ m Bewegungsgleichung: f(t): externe Anregung Musikinstrument: f(t) periodisch Fourierzerlegung: f(t) harmonisch 1.3.1. Übersicht
xh(t): • Einschwingvorgang • gedämpft • Lösung der homogenen Gleichung ( f 0 ) • festgelegt durch Anfangsbedingungen xs(t): • Asymptotische, stabile Schwingung für • spezielle Lösung der inhomogenen Gleichung • unabhängig von Anfangsbedingungen • festgelegt durch ω0, α, f0, ω Lösung:x(t) = xh(t) + xs(t)
Komplexe... Amplitude: x0 = | x0|·eiφ Geschwindigkeit: v0 = iω·x0 Beschleunigung: a0 = iω·v0 = -ω2x0 1.3.2. Gleichgewichtsschwingung ( t )
(mechanische) Impedanz: Admittanz (bzw. Mobilität): Widerstand (dissipativer Teil): Reaktanz (reaktiver Teil): Definitionen:
Resonanzamplitude: Gleichgewichtsamplitude: Resonanzverstärkung: Definitionen: = Güte
Definitionen: Dämpfung in Dezibel (dB) Dämpfung Bemerkung: Analog für andere Größen (v, a, ...) und andere Bezugspunkte
Resonanz-dominiert 1/Q 3dB Feder-dominiert 0,25 4 0,70 1,43 0 Masse-dominiert Resonanzkurve und Phasenschub:
1/Q 3dB 0,25 4 0,70 1,43 0 ω 0 Steigung ω Steigung |x0| const. 0 dB/Oktave 1/ω2 -12 dB/Oktave |v0| ω 6 dB/Oktave 1/ω -6 dB/Oktave |a0| ω2 12 dB/Oktaveconst. -0 dB/Oktave 1 Oktave Faktor 2 in ω [ ω, 2ω ] Resonanzkurve und Phasenschub:
|Z| R=ReZ Nyquist-Diagramm X=ImZ ω ω0 ω=ω0 |Y| G=ReY Q ω B=ImY Darstellungen von Impedanz und Admittanz Q = 4
Form: Anfangsbedingungen (Anregung) Einschwingdauer: einige τD Komponenten: Schwebung von ω+ω0 mit |ω-ω0| Plötzliche sin-Anregung ab t=0 Q = 10 0,2 1,2 0,8 2,0 1,0 4,0 1.3.3. Der Einschwingvorgang
mechanische Parallelschaltungelektrische Serienschaltung I1 I2 = I1 v1 = vB-vA vA vB v2 = v1 mechanische Serienschaltungelektrische Parallelschaltung I1 v= vC-vA = v1+v2 v1 = vB-vA v2 = vC-vB I I vC vA I = I1+I2 vB I2 1.3.4. Elektrisches Äquivalent
IL vm Kraft elektrische Spannung L m xγ IR γ R xD QC Geschwindigkeitsverläufe Kräftegleichgewichte Analysiere im Einzelfall: C D - +
Beispiel 1: x D F(t) γ m ~ vFeder = vDämpfer = vMasse F = FMasse + FDämpfer + FFeder
Beispiel 2: x xm D F(t) γ m ~ v = vFeder + vMasse , vFeder = vDämpfer F = FMasse = FDämpfer + FFeder
Beispiel 3: xm x F(t) D γ m ~ v = vMasse + vDämpfer , vFeder = vMasse F = FDämpfer = FMasse + FFeder
1.4. Gekoppelte Schwingungen Zerlegung: • stabile Schwingungskonfigurationen: (Eigen-)Moden • Eine Eigenfrequenz pro Mode • eine Mode pro Freiheitsgrad
mb ma Db Da DK γb γa xb xa Ca Cb La Lb Ib Ia Rb Ra CK 1.4.1. Beispiel: Zwei gekoppelte Schwinger Bewegungsgleichung:
Musikinstrumente: kleine Dämpfung Vereinfachte Diskussion für αa = αb = 0 Ansatz: xa, xb eiωt Lösung: Zwei Eigenfrequenzen
Diskussion: Minimale Frequenzaufspaltung: bei ωa= ωb keine Kopplungωa,b K = 0, ω1,2 = ωa,b Kopplung 0 ωb/ωa 0: ω1ωb , ω2ωa ωb/ωa : ω1ωa , ω2ωb
D2 m2 Anwendungen: m2 als Tilger Bass-Reflex-Lautsprecher Gitarre mit fixierten Rippen m1 D1 x1 x2 F0·eiωt 1/D1 Nach Einschwingen: m1 ~ m2 1/D2 F0·eiωt Dämpfung vernachlässigt reell 1.4.2. Erzwungene gekoppelte Schwingungen Einfaches Beispiel (Dämpfung vernachlässigt):
D2 m2 m1 D1 Resonanzen Antiresonanz (x10 = 0, x20 = max) x1 x2 F0·eiωt Konfigurationen (Moden): (Richtungen bezüglich F0 ) ω = ω1 – ε: ω = ω1 + ε: ω = ω2 – ε: ω = ω2 + ε: ω = ωA:ω = ωA:
D2 m2 m1 D1 x1 x2 F0·eiωt Theorem: In einem (beliebigen) gekoppelten System seien ω1, ω2zwei aufeinanderfolgende Resonanzfrequenzen. Das System werde im Punkt P1 angeregt und im Punkt P2 gemessen. Sind die Schwingungsamplituden in P2 relativ zu P1 in beiden Moden • entgegengesetzt |x20| durchläuft zwischen ω1, ω2ein Minimum • gleichgerichtet |x20| durchläuft zwischen ω1, ω2eine Antiresonanz ω = ω1 – ε: ω = ω1 + ε: ω = ω2 – ε: ω = ω2 + ε: ω = ωA:ω = ωA:
Theorem: In einem (beliebigen) gekoppelten System seien ω1, ω2zwei aufeinanderfolgende Resonanzfrequenzen. Das System werde im Punkt P1 angeregt und im Punkt P2 gemessen. Sind die Schwingungsamplituden in P2 relativ zu P1 in beiden Moden • entgegengesetzt |x20| durchläuft zwischen ω1, ω2ein Minimum • gleichgerichtet |x20| durchläuft zwischen ω1, ω2eine Antiresonanz Folgerung:P2= P1 Der Treiberpunkt selbst durchläuft mit wachsender Frequenz eine Folge abwechselnder Resonanzen und Antiresonanzen. Transferpunkt Treiberpunkt Beispiel: 2-D-System
P1: Erreger P2: Sensor Wichtiger Spezialfall: P1 = P2 Auslenkung Geschwindigkeit Beschleunigung Impedanzkopf Nahfeld Schallwellen (Mikrophon) mechanische Schreiber Impedanzkopf holographische Interferometrie 1.4.3. Charakterisierung des Frequenzgangs Messverfahren:
Nachgiebigkeit (Compliance) Kapazität Mobilität, Admittanz Leitwert Acceleranz 1 / Induktivität Steifigkeit 1 / Kapazität Impedanz Impedanz Dynamische Masse Induktivität Charakteristische Frequenzgangs-Messgrößen:
P1 = P2: Präfix „Treiber(punkt)-“ P1 P2: Präfix „Transfer-“ D2 m2 m1 D1 Beispiel: x1 x2 F0·eiωt Treiber-Mobilität: Transfer-Mobilität:
Mobilität Nachgiebigkeit Acceleranz Steifigkeit Impedanz Dynamische Masse ω < ωmin 0 6 12 0 -6 -12 ω > ωmax -12 -6 0 12 6 0 Asymp- totischer Bereich Asymptotisches Verhalten: ωmin: kleinste Resonanzfrequenz ωmin: größte Resonanzfrequenz ( Einheit: dB/Oktave )
Mobilität Nachgiebigkeit Acceleranz Steifigkeit Impedanz Dynamische Masse ω < ωmin 0 6 12 0 -6 -12 ω > ωmax -12 -6 0 12 6 0 Asymp- totischer Bereich Asymptotisches Verhalten: ωmin: kleinste Resonanzfrequenz ωmin: größte Resonanzfrequenz ( Einheit: dB/Oktave )
bleibt gleich klappt um 6 dB / Oktave Antiresonanz -6 dB / Oktave Beispiel: Transfer-Mobilität einer leicht gedämpften Struktur mit 4 Schwingungsmoden Schwingungsrichtung am Messpunkt relativ zum Treiberpunkt ... ω1 ω2 ω3 ω4
Im Im Im ω Re ωR ω Re ωR ω Re ωR Acceleranz a / F Nachgiebigkeit x / F Mobilität v / F Darstellung der (i.a. komplexen) charakteristischen Parameter: z. B. Impedanz: Z = |Z|eiφ = R + iX |Z|(ω) und φ(ω) ReZ(ω) und ImZ(ω) Nyquist-Diagramme , z.B. für einzelne Resonanz:
1.5. Nichtlineare Schwingungen x Lösung zu F x' Lösung zu F' x + x' Lösung zu F + F' Lineare Systeme:... • Superpositionsprinzip • Eigenfrequenzen unabhängig von Moden-Amplituden • komplexe Schreibweisen geeignet
Realistische Systeme: Nichtlineare Beiträge • Grenzen des Hookeschen Gesetzes • Turbulenz • Bogenkraft auf Saite = f (Saitenposition,Relativgeschwindigkeit) • Strömung in Rohrventilen (Blasinstrumente) = f (Druckabfall) Konsequenzen: • ω0 = ω0( x0 ) • Hysterese-Verhalten in ( x0 , ω0 )–Diagramm • Bifurkationen und chaotisches Verhalten (seltsame Attraktoren) • (d.h., System schwingt sich nicht immer auf periodische Bewegung ein!)
1.5.1. Analytische Methoden Bewegungsgleichung:
Ansatz: Fourierentwicklung • Spezialfall: F periodisch, z.B. F = F0·cos(ωt) • Störungsrechnungbei kleinen Nichtlinearitäten Einsetzen Koeffizientenvergleich
Allgemeines Verfahren: wobei: Beweis: Einsetzen und Nachrechnen!
Näherung: -Terme in g „klein“ (inklusive γ) a, φ const. während Periode & noch nichts gewonnen (Gesetz der konstanten Mühsal) Folge:
x D m γ=2mα Korrekt für ! (vgl. 1.2.) Beispiel:Schwach gedämpfter, freier, linearer Oszillator Also:
Analytisches Verfahren 1.5.2. Der Duffing-Oszillator (Paradebeispiel für Chaos und seltsame Attraktoren) Physikalischer Ansatz: D D + βmx2(nicht-lineare Dämpfung) d.h. oft: • Frequenz hängt von Amplitude ab • Hysterese bei großen Amplituden
Störungsrechnung: Ansatz: ( f(t) = f0·cos(ωt) , α 0 ) Koeffizientenvergleich der cos(ωt)-Terme: Freier Oszillator ( f0 = 0 ):
1.5.3. Selbsterregung: Van-der-Pol-Oszillator Konstanter äußerer Energiefluss (Luftströmung, Bogenstrich, ...) Musikinstrument Modulation des Energieflusses Nichtlineare Rückkopplung selbstangeregte stabile Schwingung Physikalischer Ansatz: 2α α·( 1 – x2 ) (nicht-lineare Dämpfung) d.h. • x 0 ist stets Lösung, aber nicht stabil • geeignete α Grenzzyklen • Grenzzyklen fast harmonisch, mit anharmonischen Beimischungen
ω1 ω2 Starke nichtlineare Modenkopplung 1.5.4. Moden-Stabilisierung Musikinstrumente sind ... selbsterregende Multi-Moden-Systeme ... mit annähernd linearem Moden-Verhalten ... und mit einigermaßen harmonischen Frequenzverhältnissen (Anharmonizitäten störende niederfrequente Schwebungen) Musikinstrumente erfordern periodisches, schwebungsfreies Signal: Selbstadjustierung der Eigenfrequenzen notwendig Moden-Einrastung (mode-locking) Selbststabilisierung relativer Phasen notwendig Notwendige Voraussetzung hierfür: