Download
1 / 11
120 likes | 141 Views
DARPA MARS IPR presentation on the Stanford team's development of an autonomous helicopter for mapping applications using reinforcement learning. Results include mapping data with obstacles and vegetation identified. Contact thrun@stanford.edu.

E N D
Autonomous Helicopter Mapping Andrew Ng, Mark Diel, Eric Berger, Adam Coates, Varun Ganapathi, Eric Liang, Dirk Hähnel, Rahul Biswas, Sebastian Thrun Stanford University Contact: thrun@stanford.edu, ang@cs.stanford.edu DARPA MARS IPR, Sept 23-24, 2003
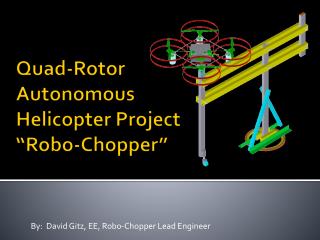
The Stanford Autonomous Helicopter Payload: 14 pounds Weight: 32 pounds • 6-Month Goals: • Flight near obstacles, caves • Maintenance-free hardware DARPA MARS IPR, Sept 23-24, 2003
The Stanford Autonomous Helicopter Magnetometer GPS IMU 802.11b PC 104 SICK lite (3.7 pounds) Intel Stayton Payload: 14 pounds Weight: 32 pounds • 6-Month Goals: • Flight near obstacles, caves • Maintenance-free hardware DARPA MARS IPR, Sept 23-24, 2003
Classical Approach: m-Synthesis Control DARPA MARS IPR, Sept 23-24, 2003
Our Approach: Reinforcement Learning DARPA MARS IPR, Sept 23-24, 2003
Classical Approach 1,000 hours of hand-tuning IMU, GPS EKF controller controls state Machine Learning Approach 3.5 minutes of flight data 10 minutes of reinforcement learning IMU, GPS EKF model controller controls state Our Approach: Reinforcement Learning DARPA MARS IPR, Sept 23-24, 2003
Four-legged walking Same learning algorithm used to control complex, very high dimensional (36D), underactuated robots. [with Lawrence and Tal] DARPA MARS IPR, Sept 23-24, 2003
Mapping (Autonomous Flight) DARPA MARS IPR, Sept 23-24, 2003
Mapping (Autonomous Flight) DARPA MARS IPR, Sept 23-24, 2003
Results (Map) WARNING: These are VRML files – you will have to edit the path to those files! Raw data Map Red = wall White = Road Green = Vegetation Yellow = Obstacle DARPA MARS IPR, Sept 23-24, 2003
Conclusions • Autonomous flight in 11 days. • Integrated flight and mapping. • Next steps: • Robust flight in confined spaces. • Coordinated ground/air mapping and navigation. DARPA MARS IPR, Sept 23-24, 2003