Download
1 / 6
70 likes | 183 Views
Construction of Abstract State Graphs with PVS. Susanne Graf and Hassen Saidi VERIMAG. Summary of the Paper. Method based on abstract interpretation a weaker abstract transition relation automatically construct an abstract state graph input: infinite state program

E N D
Construction of Abstract State Graphs with PVS Susanne Graf and Hassen Saidi VERIMAG
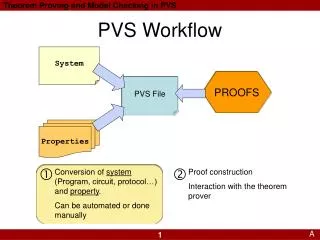
Summary of the Paper • Method based on abstract interpretation • a weaker abstract transition relation • automatically construct an abstract state graph • input: infinite state program • Monomials: particular set of abstract states • defined w.r.t. a set of state predicates 1... k • Successor states: computed by using PVS • upper approximation of the successor states • Construct abstract state graph • verify invariants • LTL prop. by MC
Summary of the Paper (2) • Abstract State Graph: • represents a relatively precise global control flow graph of the system • can be used to generate stronger structural invariants • assumes that control depends on data • Implemented the method in a tool: • interfaced with PVS, ALDÉBARAN • Verified bounded retransmission protocol: • protocol developed by Philips • used the tool to prove correctness almost automatically
Parallel Systems: Syntax Basic intuition: parallel composition of processes by interleaving and synchronization by shared variables (unity) Process: process P is vars x1:T1, ..., xn:Tn→ global, what P uses init init_pred(x1, ..., xn) → implicit pc (control var) update □ g1(x) → ass1(x) - 1 □ gn(x) → assn(x) - n Parallel composition (P1 || P2): is a process P s.t. P_init = P1_init P2_init P_vars = P1_vars P2_vars P_upd = P1_upd P2_upd Type - might be infinite (PVS type)
Transition Graph for P Given is P (vars, init, update) Define the transition graph SP = (QP, RP, IP) QP = T1 x ... x Tn RP = U i where i(q) = IP = {q | init(q) = true} RP : QP→ P(QP) ≡ RP QP x QP if gi(q) = false assi(q) otherwise P i=1
Predicate Transformers Definition: R Q x Q and P(Q) { } g → ass { } strongest postcondition: post[R]() = q . R(q,q') (q) weakest precondition: pre[R]() = q' . R(q,q') (q') R(q, q1) (q1) ... R(q, qn) (qn) property: = post[R]() = pre[R]() precondition postcondition set of guarded assignments pre[i]() = gi(x) [assi(x) / x] no quantifiers ass(q)