Download
1 / 35
360 likes | 481 Views
Evolution-based least-squares fitting using Pythagorean hodograph spline curves. Speaker: Ying .Liu November 29. 2007. www.ag.jku.at. Institute of Applied Geometry, Jphannes Kepler University ,Linz, Austira. Bert Juttler. Martin Aigner. Author:. Martin Aigner:

E N D
Evolution-based least-squares fitting using Pythagorean hodograph spline curves • Speaker: Ying .Liu • November 29. 2007
www.ag.jku.at Institute of Applied Geometry, Jphannes Kepler University ,Linz, Austira Bert Juttler Martin Aigner
Author: • Martin Aigner: • Dr. Mag., research assistant • Email: martin. aigner @ jku .at • Zbynek Sir: • Dr.; research assistant at FWF-Projekt P17387-N12 • Alumni
Author: Bert Juttler • Selected scientific activities: • Since 2003:associated editor of CAGD • Organizer of various Mini symposia • Member of program committees of numerous conferences • Research interests: • CAGD, Applied Geometry, Kinematics, Robotics, Differential Geometry
Introduction • Using PH spline curves to evoluted fitting a given set of data points or a curve • For example:
Steps: • Introduce a general framework for abstract curve fitting • Apply this framework to PH curves • Discuss the relationship between this method and Gauss-Newton iteration
An abstract framework for curve fitting via evolution • Parameterized family of curves: (s, u)-> • u is the curve parameter • s is the vector of shape parameters • Let s depend smoothly on an evolution parameter t, s( t)=( ) • Approximately compute the limit
An abstract framework for curve fitting via evolution • Each point travels with the velocity: • Normal velocity of the inner points:
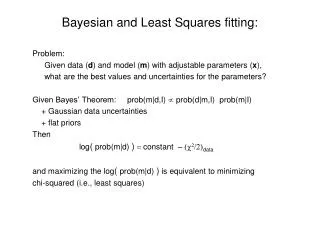
An abstract framework for curve fitting via evolution • Assume a set of data points is given. • Let and • Expected to toward their associated data points if then
An abstract framework for curve fitting via evolution • Time derivatives of the shape parameters satisfied the following equation in least-squares sense Necessary condition for a minimum
An abstract framework for curve fitting via evolution • Definition: • A given curve: • a set of parameters U is said to be regular: • A set parameters: that and • Unit normal vectors • That the matrix has a maximal rank
An abstract framework for curve fitting via evolution • Lemma: in a regular case and if all closet points are neither singular nor boundary points, then any solution of the usual least-squares fitting is a stationary point of the differential equation derived from the evolution process
Evolution of PH splines • Ordinary PH curves c (u)=[x ( u) ,y (u)] satisfied the following conditions: • Regular PH curves: let w=1. • The difference : gcd (x’ ( u ),y’ (u)) is a square of a polynomial • called preimage curve
Evolution of PH splines • Proposition: if a regular PH curve c (u) and then: • Smooth field of unit tangent vectors for all u • Parametric speed and arc-length are polynomial functions • Its offsets are rational curves
Evolution of PH splines • Let an open integral B-spline curve, and • Let
Evolution of PH splines • In the evolution we fix the knot vector, so the shape parameters are • the velocity • The unit normals
Evolution of PH splines • The length of PH spline: • The regularization term: • Which forces the length to converge to some constant value
Examples of PH splines evolution • Simple example: • fitting two circular arcs with radius 1. • Two cubic PH segments depending on 8 shape parameters • Initial position: straight line
Initial: two straight segments For the global shape =8, Gradually raised length to 14 Fix end points Insert knots Examples of PH splines
Initial: two straight segments For the global shape =8, Gradually raised length to 14 Fix end points Insert knots Examples of PH splines
Initial: two straight segments For the global shape =8, Gradually raised length to 14 Fix end points Insert knots Examples of PH splines
Initial: two straight segments For the global shape =8, Gradually raised length to 14 Fix end points Insert knots Examples of PH splines
Initial: two straight segments For the global shape =8, Gradually raised length to 14 Fix end points Insert knots Examples of PH splines
Initial: two straight segments For the global shape =8, Gradually raised length to 14 Fix end points Insert knots Example of PH splines
Initial: two straight segments For the global shape =8, Gradually raised length to 14 Fix end points Insert knots Examples of PH splines
Initial: two straight segments For the global shape =8, Gradually raised length to 14 Fix end points Insert knots Examples of PH splines
Examples of PH splines • Initial value by Hermite interpolation • Split data points at estimated inflections
Speed of convergence • Lemma: the Euler update of the shape parameters for the evolution with step h is equivalent to a Gauss-Newton step with the same h of the problem • Provided that
Speed of convergence • Quadratic convergence of the method
Concluding remarks • Least-squares fitting by PH spline cuves is not necessarily more complicated than others • Future work is devoted to using the approximation procedure in order to obtain more compact representation of NC tool paths