Download
1 / 25
260 likes | 450 Views
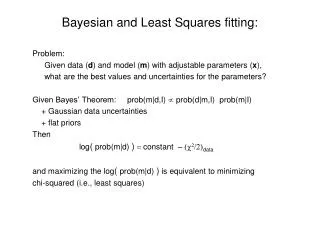
Robust Moving Least-squares Fitting with Sharp Features. Shachar Fleishman* Daniel Cohen-Or § Claudio T. Silva*. * University of Utah § Tel-Aviv university. Surface reconstruction. Noise Smooth surface Smooth sharp features

E N D
Robust Moving Least-squares Fitting with Sharp Features Shachar Fleishman* Daniel Cohen-Or§ Claudio T. Silva* * University of Utah § Tel-Aviv university
Surface reconstruction • Noise • Smooth surface • Smooth sharp features • Method for identifying and reconstructing sharp features
Point set surfaces (Levin ’98) • Defines a smooth surface using a projection operator
Point set surfaces • Defines a smooth surface using a projection operator • Noisy point set • The surface S is defined:
The MLS projection: overview • Find a point q on the surfaces whose normal goes through the projected point x • q is the projection of x
The MLS projection: overview • Find a point q on the surfaces whose normal goes through the projected point x • q is the projection of x • Improve approximation order using polynomial fit
Smoothed out Ambiguous Sharp features
Smoothed out Ambiguous Classify Sharp features
Using outlier identification algorithm That fits a polynomial patch to a neighborhood Classification
Using outlier identification algorithm That fits a polynomial patch to a neighborhood Classification
Find the center of a set of points Statistics 101 mean
Find the center of a set of points Robustly using median Statistics 101 median mean
Loop Fit a model Remove point withmaximal residual Until no more outliers Regression with backward search
Outliers can have a significant influence of the fitted model Regression with backward search
Start with an initial good but crude surface LMS (least median of squares) Incrementally improve the fit Monitor the search Regression with forward search (Atkinson and Riani)
Monitoring the forward search Residual plot
Monitoring the forward search Residual plot
and corners Smooth MLS Input with missing data Reconstructed MLS w. edges Results Polynomial fit allows reconstruction of curved edges
input smooth sharp Results Reconstructed Noisy input
Results Outliers are ignored Misaligned regions are determined to be two regions Local decision may cause inconsistencies
Summary • Classification of noisy point sets to smooth regions • Application to PSS • Reconstruct surfaces with sharp features from noisy data • Improve the stability of the projection • Local decisions may result different neighborhoods for adjacent points • Can be applied to other surface reconstruction methods such as the MPU
Acknowledgements • Department of Energy under the VIEWS program and the MICS office • The National Science Foundation under grants CCF-0401498, EIA-0323604, and OISE-0405402 • A University of Utah Seed Grant • The Israel Science Foundation (founded by the Israel Academy of Sciences and Humanities), and the Israeli Ministry of Science