Download
1 / 1
10 likes | 150 Views
Reduce torque variation at this stage. Feedback control for tracking desired angular acceleration of turbine shaft. H. Hur T. Nagata T. Kaga M. Tomizuka. Automatic Transmission Modeling and Control Applications. Overview

E N D
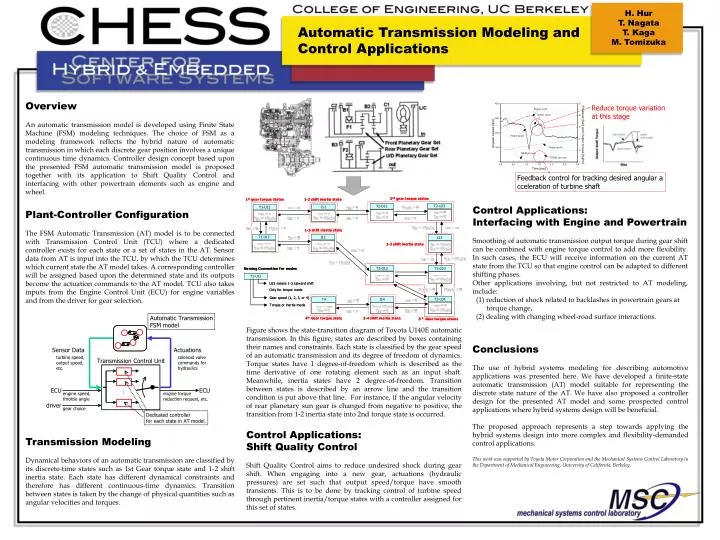
Reduce torque variation at this stage Feedback control for tracking desired angular acceleration of turbine shaft H. Hur T. Nagata T. Kaga M. Tomizuka Automatic Transmission Modeling and Control Applications Overview An automatic transmission model is developed using Finite State Machine (FSM) modeling techniques. The choice of FSM as a modeling framework reflects the hybrid nature of automatic transmission in which each discrete gear position involves a unique continuous time dynamics. Controller design concept based upon the presented FSM automatic transmission model is proposed together with its application to Shift Quality Control and interfacing with other powertrain elements such as engine and wheel. Control Applications: Interfacing with Engine and Powertrain Smoothing of automatic transmission output torque during gear shift can be combined with engine torque control to add more flexibility. In such cases, the ECU will receive information on the current AT state from the TCU so that engine control can be adapted to different shifting phases. Other applications involving, but not restricted to AT modeling, include: (1) reduction of shock related to backlashes in powertrain gears at torque change, (2) dealing with changing wheel-road surface interactions. Plant-Controller Configuration The FSM Automatic Transmission (AT) model is to be connected with Transmission Control Unit (TCU) where a dedicated controller exists for each state or a set of states in the AT. Sensor data from AT is input into the TCU, by which the TCU determines which current state the AT model takes. A corresponding controller will be assigned based upon the determined state and its outputs become the actuation commands to the AT model. TCU also takes inputs from the Engine Control Unit (ECU) for engine variables and from the driver for gear selection. Figure shows the state-transition diagram of Toyota U140E automatic transmission. In this figure, states are described by boxes containing their names and constraints. Each state is classified by the gear speed of an automatic transmission and its degree of freedom of dynamics. Torque states have 1 degree-of-freedom which is described as the time derivative of one rotating element such as an input shaft. Meanwhile, inertia states have 2 degree-of-freedom. Transition between states is described by an arrow line and the transition condition is put above that line. For instance, if the angular velocity of rear planetary sun gear is changed from negative to positive, the transition from 1-2 inertia state into 2nd torque state is occurred. Conclusions The use of hybrid systems modeling for describing automotive applications was presented here. We have developed a finite-state automatic transmission (AT) model suitable for representing the discrete state nature of the AT. We have also proposed a controller design for the presented AT model and some prospected control applications where hybrid systems design will be beneficial. The proposed approach represents a step towards applying the hybrid systems design into more complex and flexibility-demanded control applications. This work was supported by Toyota Motor Corporation and the Mechanical Systems Control Laboratory in the Department of Mechanical Engineering, University of California, Berkeley. Control Applications: Shift Quality Control Shift Quality Control aims to reduce undesired shock during gear shift. When engaging into a new gear, actuations (hydraulic pressures) are set such that output speed/torque have smooth transients. This is to be done by tracking control of turbine speed through pertinent inertia/torque states with a controller assigned for this set of states. Transmission Modeling Dynamical behaviors of an automatic transmission are classified by its discrete-time states such as 1st Gear torque state and 1-2 shift inertia state. Each state has different dynamical constraints and therefore has different continuous-time dynamics. Transition between states is taken by the change of physical quantities such as angular velocities and torques.






















