Download
1 / 15
150 likes | 254 Views
EKF-based Paramater Estimation for a Lumped, Single Plate Heat Exchanger. Andy Gewitz Mentor: Marwan Al-Haik Summer, 2005. Introduction.

E N D
EKF-based Paramater Estimation for a Lumped, Single Plate Heat Exchanger • Andy Gewitz • Mentor: Marwan Al-Haik • Summer, 2005
Introduction Parameter estimation can be loosely defined as the process of using measurements to determine the scalar quantities which fit a mathematical model to experimental data. The estimation of parameters for a model of a single-plate parallel-flow heat exchanger is carried out here using an Extended Kalman Filter (EKF), which is an easy-to-implement, suboptimal estimation algorithm for nonlinear dynamic systems.
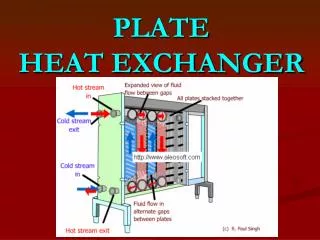
The Heat Exchanger Model We utilize the “direct lumping” approach in which the heat exchanger is divided into sections (two “hot” and two “cold”), the temperature in each section is taken as a state variable, and the following physical assumptions are made: • negligible transfer of heat to the surrounding environment • absence of heat conduction in the flow direction in both the plates and fluids • each section has a uniform temperature and constant specific heat capacity Fluids at different initial temperatures are allowed to pass, in counter-flow directions, through parallel chambers which enclose a metal plate. In the process, heat is conducted between the fluid “sections.”
Figure 1: Diagram of a multi-plate counterflow heat exchanger, with the plates arranged in series. The directed blue and red “flows” represent the cold and hot fluids, respectively.
Th2 (= Thout) Th1 Tc2 (=Tcout)Tc1 Figure 2: Schematic of the counter flow of the fluids across a single plate. Each fluid is “lumped” (“sectioned”) as prescribed by the model.
State-Space Formulation General Linear State-Space Model for System DynamicsSystem UpdateMeasurement Update ● The (column) vectors v(t) and w(t) encode process noises and measurement noises, respectively, for each state variable in the vector x(t) ● θ is a vector of model parameters, and we assume θ(t+1) = θ(t) We can estimate the states and parameters simultaneously by forming , which leads to the following nonlinear model: System Update Measurement Update where and .
Heat Exchanger Equations The model for the heat exchanger is governed by the following state-space formulation, where the vector of temperatures serves as the initial state vector to which we append the vector θ = [α, β, τh, τc]T of model parameters.
EKF Algorithm Summary of Core Algorithm* State at time t Prediction Estimation True State Update Measurement Update Updated State Estimate State Prediction Calculation of Measurement Residual Updated Covariances (states, states-parameters, parameters) State Covariance at time t Calculation of State Gain Linearization of System Calculation of Residual Covariance Calculation of Parameter Gain Updated Parameter Estimate *P: Covariance Matrix W: Gain Matrix S: Residual Covariance Matrix
Results Parameter Estimation These simulations were performed with initial process noises of 0.2 for each parameter. Note the convergence of the results of the estimation for a relatively large runtime of t = 1000. Increasing the noise level for a given parameter, one observes the simulations begin to lose the convergence properties readily apparent in these plots.
State Estimation These plots include the values of the state variables as governed by the model, as well as the measured, predicted, and estimated values of the state variables as calculated using the EKF. The apparent violation of the Second Law of Thermodynamics as evidenced by the “crossing” of the plots for adjacent model sections indicates a shortcoming in the underlying model.
Estimation Errors The estimation errors for the states fluctuate about zero, and fall within the range one would expect for an accurate simulation based on the EKF theory.
Residuals The residuals (innovations) are seen to have expected values of zero for each state estimate, as prescribed by the EKF theory. The noticeable deviations which occur at the start of each estimation may be ignored for experimental purposes.
We have estimated the parameters of a linear system by considering a related nonlinear problem in which the vector of parameters is adjoined to the vector of states and the EKF is applied. The estimation has yielded acceptable convergence for sufficiently small user-input parameter noise values, and we have provided plots of the estimated parameters and states in such a case. However, it must be noted that this convergence is particularly sensitive to noise levels, a fact which follows from the inherent nonlinear, online approximations central to the EKF algorithm. We also note that the model we have used, based on [4], admits a violation of the Second Law of Thermodynamics, and so it would be a worthwhile endeavor to explore the use of a model of the type suggested by [2] in order to examine how the results of our estimation could be brought into better agreement with the physics of the heat-exchanger system under investigation. Conclusions
References 1. L. Ljung, “Asymptotic Behavior of the Extended Kalman Filter as a Parameter Estimator for Linear Systems”, IEEE Trans. Automatic Control, AC-24:36-50, 1 1979. 2. B. Elmegaard, N. Houbak, “Robust Implementation of Process Simulators and Their Associated Models”, ECOS 2000, Enschede, The Netherlands, 2000. 3. Y. Bar-Shalom , X. Rong Li, Thiagalingam Kirubarajan. Estimation with Applications to Tracking and Navigation: Theory, Algorithms, and Software. Wiley: New York, 2001. 4. G. Jonsson, O. Palsson, “An Application of extended Kalman Filtering to Heat Exchanger Models”, ASME J. Dynamic Systems, Measurement, and Control, 116:257-264, JUN 1994.