Download
1 / 9
90 likes | 258 Views
Asia-Pacific Student Summer School on Smart Structures Technology KAIST, Daejeon, Korea July 31 ~ August 1, 2008. Structural Control (Lab.). Lecturers : H.-J. Jung, H. Myung, KAIST, Korea Assistants : S.H. Park, D.D. Jang, KAIST, Korea. Lab. Schedule. *Group 1: 13:00-15:00

E N D
Asia-Pacific Student Summer School on Smart Structures Technology KAIST, Daejeon, Korea July 31 ~ August 1, 2008 Structural Control(Lab.) Lecturers: H.-J. Jung, H. Myung, KAIST, Korea Assistants: S.H. Park, D.D. Jang, KAIST, Korea
Lab. Schedule *Group 1: 13:00-15:00 Group 2: 15:00-17:00
Asia-Pacific Student Summer School on Smart Structures Technology KAIST, Daejeon, Korea July 31, 2008 Day 1. Lecturers: H.-J. Jung, H. Myung, KAIST, Korea Assistants: S.H. Park, D.D. Jang, KAIST, Korea
Simple TMD Design Contest • PROBLEM • Find the optimal TMD mass within 20 min. • Submit your answer including the solution procedure. • Verify the answer using the shaking table system. • Notes • Do not consider the damping. • Refer to Prof. Koo’s lecture material.
Simple TMD Design Contest • GIVEN DATA • SDOF structural model (Fig. 1) • Mass: 19.15 kg • Free vibration data • - D:\08summer_school\control\TMD\free_vib.mat • (for Team 3 & Team 7: C:\08summer_school\...) • - Use Matlab to handle the data • 1. go to the abovementioned directory. • 2. type “load free_vib”, then you have the array “str”. • (1st column: time (sec); 2nd column: displ. (mm)) • TMD (Fig. 2) • Spring coefficient: 44 N/m ⅹ 4ea
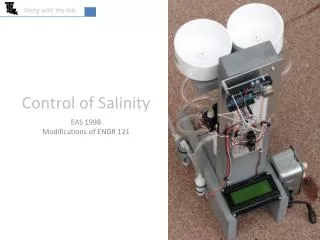
Active Control Using Piezo-Actuator • LAB.: System identification (SI) of a cantilever • beam for active control PZT actuator PZT sensor Notebook DAQ Terminal block Power Amplifier Experimental Setup
Active Control Using Piezo-Actuator • Structure • Cantilever beam made of aluminum (500(L) ⅹ 50(W) ⅹ 0.8(t) (mm)) • Sensor, Compensator & Exciter • Piezoceramic patch • Data Acquisition & Real Time Control • Hardware: NI DAQCard-6062E for PCMCIA & Terminal Block BNC-2110 • Software: MATLAB Real Time Workshop • Other Equipments • Power Amplifier (or High Voltage Amplifier) • Control Algorithm for active control • Positive Position Feedback (PPF) Control (sample controller) : DAY 2
Active Control Using Piezo-Actuator • DEMONSTRATION: Active control using • piezo-actuators and piezo-sensors Excitation uncontrolled Excitation controlled
See You Tomorrow! *Group 1: 13:00-15:00 Group 2: 15:00-17:00