Download
1 / 29
300 likes | 568 Views
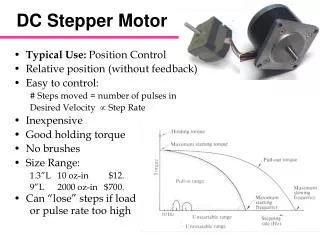
Unraveling The Mystery of Stepper Motor Technology. Jeramé Chamberlain Nippon Pulse America, Inc., USA. What is a Open Loop Stepper Motor System?. What Are Stepper Motors? How Do Stepper Motors Work? Troubleshoot & Test Stepper Motors. Basic Stepper Application. PHASE A. S. N S. ●.

E N D
Unraveling The Mystery of Stepper Motor Technology Jeramé Chamberlain Nippon Pulse America, Inc., USA
What is a Open LoopStepper Motor System? • What Are Stepper Motors? • How Do Stepper Motors Work? • Troubleshoot & Test Stepper Motors
PHASE A S N S ● PHASE B PHASE B N PHASE A Stepper Motor Coil
N S ● N S N S ● ● PHASE A PHASE A One PhaseStep Sequence S N S S N ● PHASE B PHASE B PHASE B PHASE B N STEP 1 STEP 2 PHASE A Two PhaseStepper Motor PHASE A PHASE A PHASE A N N S PHASE B PHASE B PHASE B PHASE B S STEP 4 STEP 3 PHASE A PHASE A
Types of Stepper Motors • Permanent-Magnet (PM) • PM rotor & electromagnetic coil • Variable Reluctance (VR) • No PM, no residual torque • Hybrid – NEMA Sizing • Combined PM & VR Technology
Bipolar Coil Winding • Current flow and electromagnetic polarity is reverses in the windings • Each phase is a single winding
Unipolar Coil Winding • Current flow and electromagnetic polarity is NOT reversed in the windings. Polarity comes from alternately energized windings • Sometimes calledfour-phase steppers
Motors Need MaintenanceSteppers – Not So Much • Stalled motors burn up • Steppers operate in stall condition • Most brushes go bad • Steppers are brushless • All bearings go bad • Quality Stepper bearings are rated from 90-100K hours • People break them • Hammers don’t fix Steppers
Ohmmeter Test With Steppers • Bipolar • Always 4 leads • Resistance is the same in both windings and both directions • Some 8 lead motors can be connected as bipolar
Ohmmeter Test With Steppers • Unipolar • 5 or 6 leads • Resistance from each phase to Common is the same in both directions • If 5 leads, two commons connected • Some 8 lead motors can be Unipolar
Stepper Motor Electronic System • CPU, Controller, Sequencer, Driver • One or more parts can be combined, based on motion complexity
Controller Receives & Coordinates • A dedicated controller generates motion profiles that produce smoother motor operation than just with a CPU.
Controller Manages & Interpolates • Some controllers provide interpolation between motors to produce smooth XYZ motions – CNC Machines
Two Outputs Types to Sequencer • Pulse & Direction – Speed & Rotation • CW/CCW – Speed & Rotation
One Controller – Two Output Types • Pulse & Direction – Speed & Rotation • CW/CCW – Speed & Rotation • Pulse & Direction is the most common format used in the USA • PCL6045B can output both formats
Stepper Motor Sequencers • Sequencers read speed and direction from controller and deliver excitation sequence to the driver
Bipolar Stepper Drivers • When Q1a and Q4a (green) are on, current flows in one direction • When Q2a and Q3a (red) are turned on, current flow is reversed
Unipolar Stepper Drivers • Half the drive electronics of bipolar, and 30% less torque • However, unipolar coils allow a higher pulse rate than bipolar, before becoming saturated.
Current Lags Voltage in an Inductor • Torque from stepper motors is generated by current, not voltage • PWM or Chopper drive manages current through a switch, applied at higher voltages to induce more winding current • Chopper delivers more torque at higher speeds
Half Stepping A Stepper Motor • Easiest way to accomplish half stepping is by using 1-2 phase excitation • Divides a stepper’s full step angle by two 7.5°/2 = 3.25° per half step • 30% loss of torque depending on step rate when compared to full step • Winding is not energized during each alternating half step
N S ● S N S N ● ● PHASE A PHASE A Half SteppingSequence S N S S N ● PHASE B PHASE B PHASE B PHASE B N STEP 1 STEP 3 PHASE A Two PhaseStepper Motor PHASE A PHASE A PHASE A N N N N S S PHASE B PHASE B PHASE B PHASE B S S STEP 4 STEP 2 PHASE A PHASE A
Microstepping A Stepper Motor • Full step can be broken into as many as 512 parts • Current is limited through each winding. • Unequal pull on the magnet means it moves toward the weaker winding • Torque falls rapidly as speed increases • Steps are not constant for positioning • Microstepping should only be used for smooth movement.