Download
1 / 3
60 likes | 340 Views
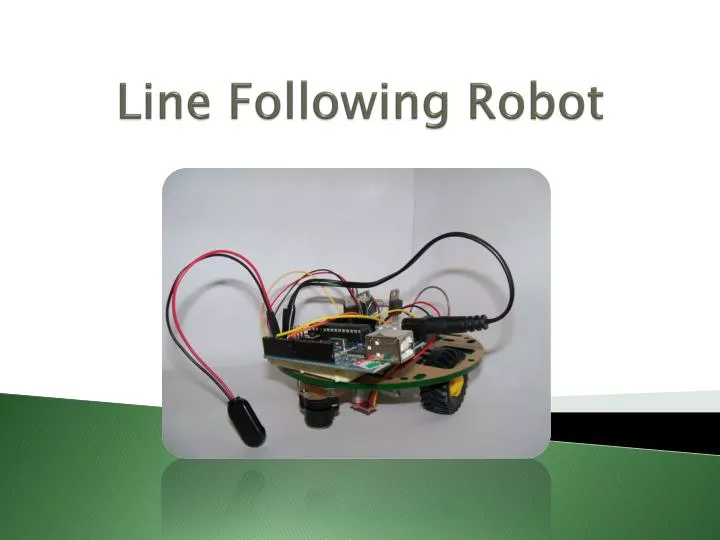
Line Following Robot. What’s in the ‘ bot. Light Reflecting sensors Motor controller (H-bridge) Arduino (Microcontroller). How it Works. Sensors read how much light is reflected Microcontroller determines the light value Motors speed up or slow down to keep robot following line.

E N D
What’s in the ‘bot • Light Reflecting sensors • Motor controller (H-bridge) • Arduino (Microcontroller)
How it Works • Sensors read how much light is reflected • Microcontroller determines the light value • Motors speed up or slow down to keep robot following line