Download
1 / 35
350 likes | 373 Views
This research focuses on the classification of speech recognition hypotheses by combining acoustic and pragmatic features to assess the quality of spoken dialogue systems. By integrating machine learning classifiers and experimental domains like chess and WITAS, the study enhances usability through accurate hypothesis assessment. The results show a significant reduction in error rates and improved system reactivity, paving the way for future work on enhancing dialogue flow and efficiency in interactive systems.

E N D
Automatic Classification of Speech Recognition Hypotheses Using Acoustic and Pragmatic Features Malte Gabsdil Universität des Saarlandes
The Problem (theoretical) • Grounding: establishing common ground between dialogue participants • “Did H correctly understand what S said?” • Combination of bottom-up (“signal”) and top-down (“expectation”) information • Clark (1996): Action ladders • upward completion • downward evidence
The Problem (practical) • Assessment of recognition quality for spoken dialogue systems • Information sources • speech/recognition output (“acoustic”) • dialogue/task context (“pragmatic”) • Crucial for usability and user satisfaction • avoid misunderstandings • promote dialogue flow and efficiency
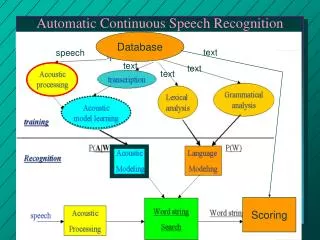
interpretation Dialogue Manager dialogue history dialogue model response selection The General Picture • Dialogue System Architecture ASR Generation
interpretation Best hypothesis + confidence n-Best hypotheses + confidence Dialogue Manager dialogue history dialogue model Confidence rejection thresholds response selection Acoustic features Pragmatic features A Closer Look • How to assess recognition quality? • decision problem ASR Machine Learning Classifier
Overview • Machine learning classifiers • Acoustic and pragmatic features • Experiment 1: Chess • exemplary domain • Experiment 2: WITAS • complex spoken dialogue system • Conclusions & Topics for Future Work
Machine Learning Classifiers • Concept learners • learn decision function • training: present feature vectors annotated with correct class • testing: classify unseen feature vectors • Combine acoustic and pragmatic features to classify recognition hypotheses as accept, (clarify), reject, or ignore
Acoustic Information • Derived from speech waveforms and recognition output • Low level features • amplitude, pitch (f0), duration, tempo (e.g. Levow 1998, Litman et al. 2000) • Recogniser confidences • normalised probability that a sequence of recognised words is correct (e.g. Wessel et al. 2001)
Pragmatic Information • Derived from the dialogue context and task knowledge • Dialogue features • adjacency pairs: current/previous dialogue move, DM bigram frequencies • reference: unresolvable definite NPs/PROs • Task features (scenario dependent) • evaluation of move scores (Chess), conflicts in action preconds and effects of (WITAS)
Experiment 1: Chess • Recognise spoken chess move instructions • speech interface to computer chess program • Exemplary domain to test methodology • nice properties, easy to control • Pragmatic features: automatic move evaluation scores (Crafty) • Acoustic features: recogniser confidence scores (Nuance 8.0)
Data & Design • Subjects replay given chess games • instruct each other to move pieces • approx. 2000 move instructions in different data sets (devel, train, test) • 5 x 2 x 6 design • 5 systems for classifying recognition results (main effect) • 2 game levels (strong vs. weak) • 6 pairs of players
Systems • Task: accept or reject rec. hypotheses • Baseline • confidence rejection threshold • binary classification of best hypothesis • ML System • SVM learner (best on dev. set) • binary classication of 10-best results • choose first classified as accept, else reject
Results • Accuracy: • Baseline: 64.3%, ML System: 97.2%
Evaluation • 82.2% relative error rate reduction • χ² test on confusion matrices • highly significant (p<.001) • Combination of acoustic and pragmatic information outperforms standard approach • System reacts appropriately more often → increased usability
Experiment 2: WITAS • Operator interaction with robot helicopter • Multi-modal references, collaborative activities, multi-tasking • Differences to chess experiment • complex dialogue scenario • complex system (ISU-based, planning, …) • much larger grammar and vocabulary • Chess 37 GR, Vocab 50 FEHLT WAS • open mic recordings (ignore class)
Data Preparation • 30 dialogues (6 users, 303 utterances) • Manual transcriptions • Offline recognition (10best) and parsing→ quasi-logical forms • Hypothesis labelling: • accept: same QLF • reject: out-of-grammar or different QLF • ignore: “crosstalk” not directed to system
Example Features • Acoustic • low level: amplitude (RMS) • recogniser: hypothesis confidence score, rank in nbest list • Pragmatic • dialogue: current/previous DM, DM bigram probability, #unresolvable definite NPs • task: #conflicts in planning operators (e.g. already satisfied effects)
Results • Context-sensitive LMs • Accuracy: 65.68% • Wfscore: 61.81% • (higher price) • TiMBL (optimised) • Accuracy: 86.14% • Wfscore: 86.39%
Evaluation • 59.6% relative error rate reduction • χ² test on confusion matrices • highly significant (p<.001) • Combination of acoustic and pragmatic information outperforms grammar switching approach • System reacts appropriately more often → increased usability
WITAS Features • Importance according to χ² 1. confidence (ac: recogniser) 2. DMBigramFrequency (pr: dialogue) 3. currentDM (pr: dialogue) 4. minAmp (ac: low level) 5. hypothesisLength (ac: recogniser) 6. RMSamp (ac: low level) 7. currentCommand (pr: dialogue) 8. minWordConf (ac: recogniser) 9. aqMatch (pr: dialogue) 10. nbestRank (ac: recogniser)
Summary/Achievements • Assessment of recognition quality for spoken dialogue systems (grounding) • Combination of acoustic and pragmatic information via machine learning • Highly significant improvements in classification accuracy over standard methods (incl. “grammar switching”) • Expect better system behaviour and user satisfaction
Topics for Future Work • Usability evaluation • systems with and w/o classification module • Generic and system-specific features • which features are available across systems? • Tools for ISU-based systems • module in DIPPER software library • Clarification • flexible generation (alternative questions, word-level clarification)
Our Proposal • Combine acoustic and pragmatic information in a principled way • Machine learning to predict the grounding status of competing recognition hypotheses of user utterances • Evaluation against standard methods in spoken dialogue system engineering • confidence rejection thresholds
1. 1. 2. 2. 3. 3. 4. 4. 5. 5. 6. 6. dialogue contexttask knowledge 7. 7. 8. 8. 9. 9. … … Dialogue Manager ASR ML classifier Acoustic information Pragmatic information Application
Chess Results • Accuracy: • Base: 64.3%, LM: 93.5%, ML: 97.2%
Data/Baseline • Data from user study with WITAS • 6 subjects, 5 tasks each (“open mic”) • 30 dialogues (303 user utterances) • recorded utterances and logs of WITAS Information State (dialogue history) • Originally collected to evaluate a “grammar switching” version of WITAS (= Baseline; Lemon 2004)
Data Preparation/Setup • Manual transcription of all utterances • Offline recognition (10best) with “full” grammar and processing with NLU component (quasi-logical forms) • Hypothesis labelling: • accept: same QLF • reject: out-of-grammar or different QLF • ignore: “crosstalk” not directed to system
Acoustic Features • Low level: • RMSamp, minAmp (abs), meanAmp (abs) • motiv: detect crosstalk • Recogniser output/confidence scores: • nbest rank, hypothesisLength (words) • hyp. confidence, confidence zScore, confidence SD, minWordConf • motiv: quality estimation within and across hypotheses
Pragmatic Features • Dialogue: • currentDM, DMTactiveNode, qaMatch, aqMatch, DMbigramFreq, currentCommand • #unresNPs, #unresPROs, #uniqueIndefs • motiv: adjacency pairs, unlikely references • Task: • taskConflict (same command already active), taskConstraintConflict (fly vs. land)
Importance of Features • What are the most predictive features? • χ² statistics: correlate feature values with different classes • computed for each feature from value/class contingency tables • Oij: observed frequencies; Eij: expected frequencies • n.j: sum over column j; ni.: sum over row i;n..: #instances
Simple Example • Feature A • Feature B • χ² = 0 • χ² = 2*(30²/50)+2*0+ 2*(55²/75)+ 2*(85²/200) = 188.92