Download
1 / 66
690 likes | 847 Views
How can we get a vertical profile of the wind in the atmosphere?. SODAR. Sodar : Sound detection and ranging A sodar is an acoustic system used to remotely measure wind speed and turbulence characteristics in the lower atmosphere.

E N D
How can we get a vertical profile of the wind in the atmosphere?
SODAR Sodar: Sound detection and ranging A sodar is an acoustic system used to remotely measure wind speed and turbulence characteristics in the lower atmosphere. Sodar systems are like radar (radio detection and ranging) systems except that sound waves rather than radio waves are used for detection.
ASC-4000 miniSODAR specifications Maximum sampling height 250 meters Minimum sampling height 15 meters Height resolution 5 meters Operating frequency range 4500 to 5500 Hz Wind table averaging interval 30 sec to 1 hour Wind speed range 0 to 50 meters/sec Wind speed accuracy <0.50 meters/sec Wind direction range 0 to 359 degrees Wind direction accuracy ±5.0 degrees Operating voltage (DC option) 12 VDC Power consumption (DC option) 75 watts (average) Antenna base weight 200 kg
Basic principles of operation When an acoustic (sound) pulse transmitted through the atmosphere meets an eddy, its energy is scattered in all directions. Although different scattering patterns result from thermal and mechanical turbulence, some of the acoustic energy is always reflected back towards the sound source. That backscattered energy (atmospheric echo) can be measured using a monostatic sodar system. A monostatic sodar system is one in which the transmitting and receiving antennas are collocated, and thus the scattering angle between the target eddies and the sodar antenna is 180 degrees. The backscattered energy is caused by thermally-induced turbulence only. (www.sodar.com)
Velocity of Sound The speed of sound in air is defined as the propagation velocity of acoustic waves relative to the air. Where cp is the specific heat for dry air at constant pressure cv = specific heat at constant volume of dry air R = gas constant of dry air T = absolute temperature
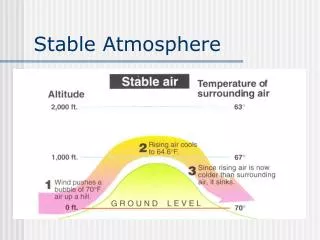
How Sodars work Much information about the atmosphere can be derived from monostatic sodar systems. The intensityor amplitude of the returned energy is proportional to the CT2 function, which is related to the thermal structure and stability of the atmosphere. CT2 is called the temperature structure function and has characteristic patterns during ground-based radiation inversions, within elevated inversion layers, at the periphery of convective columns or thermals, in sea breeze/land breeze frontal boundaries, and at any interface between air masses of different temperatures. (www.sodar.com)
Doppler effect Due to the Doppler effect, measuring the shift in the frequencyof the returned signal relative to the frequency of the transmitted signal provides a measure of air movement at the position of the scattering eddy. When the target (a reflecting turbulent eddy) is moving toward the sodar antenna, the frequency of the backscattered return signal will be higher than the frequency of the transmitted signal. Conversely, when the target is moving away from the antenna, the frequency of the returned signal will be lower. This is the physical characteristic that is used by Doppler sodar systems to measure atmospheric winds and turbulence. (www.sodar.com)
How Sodars work By measuring the intensity and the frequency of the returned signal as a function of time after the transmitted pulse, the thermal structure and radial velocity of the atmosphere at varying distances from the transmission antenna can be determined. Additional information can be obtained by transmitting consecutive pulses in the vertical direction and in two or more orthogonal directions tilted slightly from the vertical. Geometric calculations can then be used to obtain vertical profiles of the horizontal wind direction and both horizontal and vertical wind speeds. (www.sodar.com)
A sodar system transmits and receives acoustic signals within a specific frequency band. Any background noise within this frequency band can affect signal reception. Since the return signal strength usually varies inversely with target height, the weaker signals from greater heights are more readily lost in the background noise. Thus high levels of background noise may reduce the maximum reporting height to a level below that obtainable in the absence of noise. Certain noise sources can also bias the sodar data. Thus, it is important to identify potential noise sources and estimate the background noise level when evaluating a candidate site for a sodar system.
CT2 (temperature structure function) (Dubosclard 1982)
CT2 (temperature structure function) (Dubosclard 1982)
Sodar Problems • One of the fundamental problems in designing phased-array antennas is to keep precipitation out of the array elements. • There are two general approaches for accomplishing this: • use specially-designed folded horns attached to each of the array elements. • 2. use a reflector board so that the array does not have to point upward.
One of the other principle problems with sodar systems is ground clutter. Interference from ground clutter occurs when side-lobe energy radiating from a sodar antenna on transmit is reflected back to the antenna by nearby objects such as buildings, trees, smokestacks or towers. This reflected side-lobe energy can overwhelm the atmospheric return signal and cause the component wind speeds reported by a sodar system to be zero-biased. Thus, sodar systems must either be located in areas with wide-open wind fetches (i.e., areas with no reflecting objects), or they must be designed to substantially eliminate side-lobe energy.
Sodar Types Another fundamental difference in sodar systems is the use of single-frequency versus frequency-coded pulses. In single-frequency systems, only a single frequency is transmitted. Single-frequency sodar systems make a distinctive pinging noise when in operation. Single-frequency operation provides for simplicity and accuracy and data at the lowest levels (as low as 15 to 20 m) can be collected due to the short transmit pulse length. In a system using a frequency-coded pulse, the transmit pulse is comprised of several different frequencies which are emitted serially, causing the system to make a singing noise when in operation.
Sodar Types Frequency coding of the transmit pulse is done to gain maximum altitude without losing altitude resolution. Although frequency coding may enhance altitude performance, it may offer some drawbacks as well. Depending on how it is implemented, frequency coding may result in unwanted smoothing of the data in a phased-array system. And when a sodar system is operated for maximum altitude, data quality at the lower levels may be degraded because of the long delay between samples.
Signal processing Signal processing is another area where sodar systems may differ substantially. Most commercial sodar systems currently on the market use a Fast Fourier Transform (FFT) to derive the signal Doppler shift, but a variety of techniques may be used both before and after FFT processing, primarily to improve signal detection. One technique is to average the signal. Signal averaging may be used either in the time domain or the frequency domain in an attempt to reduce noise and improve the signal-to-noise ratio, which is usually the primary criterion for data acceptance.
Signal processing Perhaps the two major approaches to signal processing are to either: 1) average the spectra for all pulse sequences and then locate the region of maximum spectral energy or 2) locate the region of maximum spectral energy in each pulse sequence and then average the results. In the latter approach, the number of valid samples for an averaging period may be used as an additional data acceptance criterion. In either case, a technique known as "bin averaging" is often used to locate the frequency region of the signal within the working frequency bandwidth. This also helps to improve the spectral resolution of the FFT.