Download

1 / 35
350 likes | 364 Views
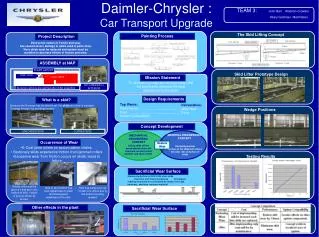
Learn essential tips for designing a robot with skid tank steering, ensuring it moves and rotates correctly. Explore wheel types, center of gravity considerations, wheelbase design, chain alignment, supporting shafts, and pivot points. Discover robust techniques for reliable navigation and dynamic environments. Expert insights from Zan Hecht, Nathan Gray, and Gaurav S. Sukhatme.

E N D
ROBOT Skid (Tank) Steering B A
ROBOT Building a Robot Skid (Tank) Steering How to be sure it will go straight? B A
ROBOT Building a Robot Skid (Tank) Steering How to be sure it will go straight? B A
ROBOT Building a Robot Skid (Tank) Steering A B How to be sure it will rotate correctly?
ROBOT Building a Robot Skid (Tank) Steering A B How to be sure it will rotate correctly?
ROBOT Building a Robot Skid (Tank) Steering A B How to be sure it will rotate correctly?
4 Wheels vs. 2 Wheels ROBOT What is better, four wheels or two wheels?
ROBOT ROBOT Building a Robot 4 Wheels vs. 2 Wheels Think always about the center of gravity for your wheeled vehicle
ROBOT ROBOT Building a Robot 4 Wheels vs. 2 Wheels
Center of Gravity Bad designs? good designs?
Building a Robot Center of Gravity Often the answer depends on your requirements, the specification of the robot
Building a Robot Center of Gravity
Building a Robot Center of Gravity
Building a Robot Wheelbase
Building a Robot Wheelbase You must consider early in design how you want your robot to rotate and move in narrow spaces.
Building a Robot Wheelbase
motor Chain Alignment • Important aspect of design is the alignment of chains, gears or pulleys. • This relates also to cams and fourbars.
motor Supporting Shafts
motor Building a Robot Supporting Shafts Shafts must be well-supported!
motor Building a Robot Supporting Shafts • This is a really bad design. • Many early designs from this class were like this, although I told students not to do this.
motor Building a Robot Supporting Shafts
motor Building a Robot Supporting Shafts
motor Building a Robot Supporting Shafts
motor Building a Robot Supporting Shafts
motor Building a Robot Supporting Shafts Best designs, If you can.
Pivots • There are many pivots in robot arms, head, legs, etc. • Do not forget to design them well Teflon Washer Nylock Nylock Steel Washer
Robot Base Example It is good to have some experience with advanced robot kits like Tetrix of Vex before you design your own robot parts.
Robot design goals • Simple: easy to replicate and less to go wrong! • Ask: Is there an easier solution? • Robust: don’t want robots falling apart on the table! • Compact • Small enough to turn in tight spaces • Keep the center of gravity between the wheels • Wire routing – tuck wires in so they don’t get pulled loose • Predictable and reliable • Behavior should be consistent and repeatable • Aesthetics: it’s nice to have a good looking robot!
Some Robust Techniques • Shielding light sensors • Solid construction • Using good batteries • Going straight (enough) • Reliable Navigation
Dynamic Environment • Even with good design, construction and programming, there can still be problems • At first, robots and programs are designed assuming a well known (static) environment without any interference • Unfortunately, things do change: sunlight, spotlights, camera flashes, dust on the tables and wheels, the battery power level, etc • There are ways to mitigate some of these
Materials used • Zan Hecht • Nathan Gray • Gaurav S. Sukhatme