Download
1 / 17
170 likes | 187 Views
Explore the fundamentals of 3D graphics programming, covering camera positions and projections, affine transformations, and composition of transformations. Learn the essential concepts and techniques to create immersive 3D visualizations and animations with OpenGL.

E N D
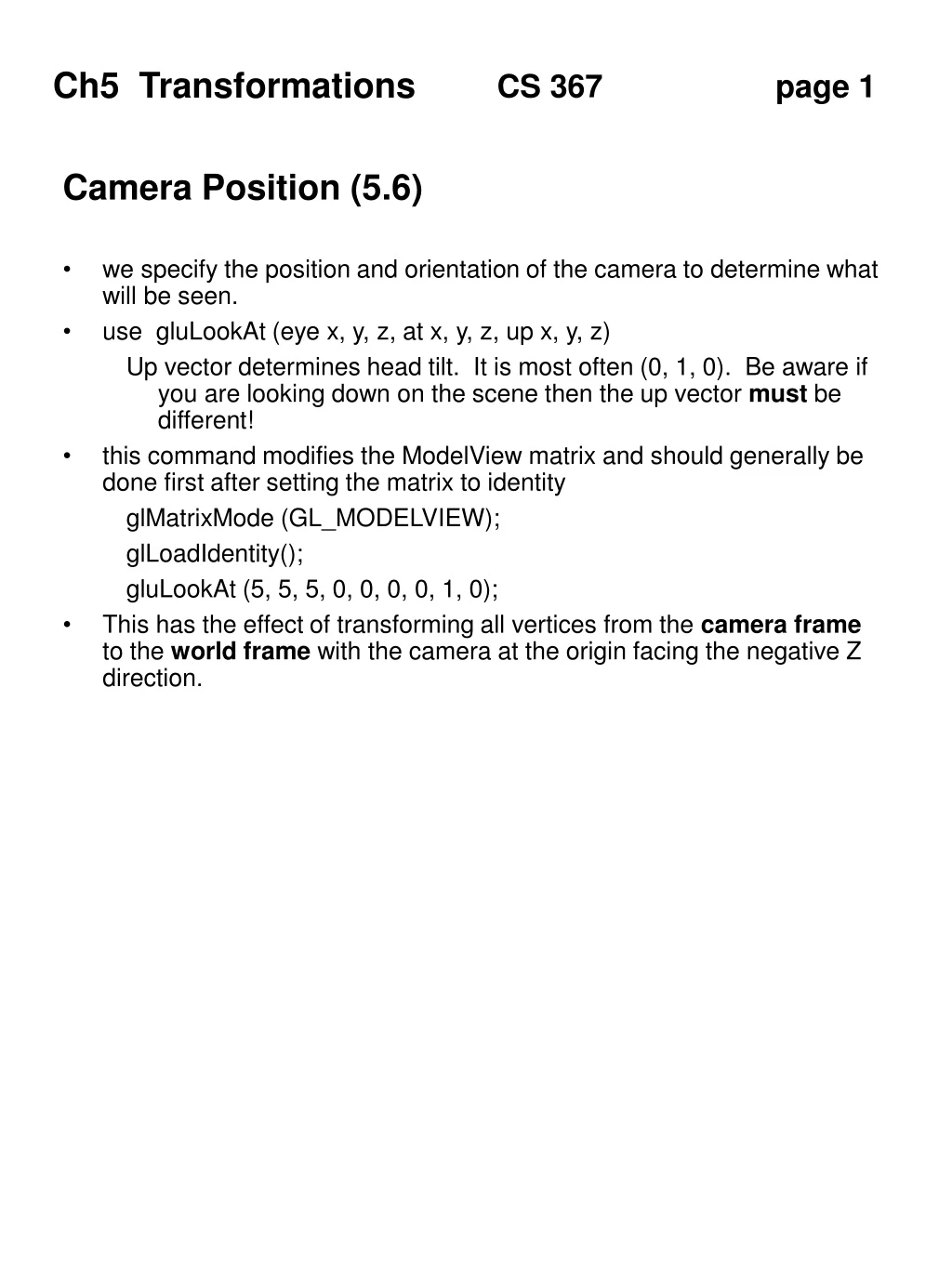
Camera Position (5.6) • we specify the position and orientation of the camera to determine what will be seen. • use gluLookAt (eye x, y, z, at x, y, z, up x, y, z) • Up vector determines head tilt. It is most often (0, 1, 0). Be aware if you are looking down on the scene then the up vector must be different! • this command modifies the ModelView matrix and should generally be done first after setting the matrix to identity • glMatrixMode (GL_MODELVIEW); • glLoadIdentity(); • gluLookAt (5, 5, 5, 0, 0, 0, 0, 1, 0); • This has the effect of transforming all vertices from the camera frame to the world frame with the camera at the origin facing the negative Z direction.
Projection • There are many different ways to draw 3D objects in drafting and freehand drawing. Computer graphics uses only two of them. Think of each projection as a different kind of lens on the camera. • Viewing Volume • Determines what will be seen. Objects (or portions of objects) not within the view volume will be clipped. • Parallel Projection / Orthographic • Preserves correct length even when objects are far away. This is an artificial projection but is useful for architects and engineers. • The viewing volume is a 3D box. • glMatrixMode (GL_PROJECTION); • glLoadIdentity(); • glOrtho (left, right, bottom, top, near, far);
Perspective • Perspective Projection • Creates foreshortening, the appearance that objects farther away are smaller. This is more realistic. • The viewing volume is a truncated pyramid called a frustum. • glMatrixMode (GL_PROJECTION); • glLoadIdentity(); • gluPerspective (view angle, aspect, near, far); • view angle is defined in degrees and can be considered a zoom lens 0 - 180 • aspect ration is width divided by height (1.0) • near and far should always be positive with respect to camera
Affine Transformations (5.3) • Skim 5.2 for background material on 2D transformations • Homogeneous Coordinates • 3D points are represented in 4D to make calculations easier • p(x, y, z, w) w is usually set to 1 • vector (x, y, z, w) w is usually set to 0 • Affine Transformations • convert one point into another • p’ = f(p) • different functions are used for different transformations • straight lines are maintained • rotation, scaling, and translation • apply to each point of an object • 4x4 matrices help to make the process more efficient • p’ = Mp • this is post multiplication • the book refers to points as a column [x y z w]T • Group Activity • P1 = (3, 5, 7, 1) • P2 = Identity * P1;
Translation • displaces a point a fixed amount in x, y, and z • shape and size remain the same • p’ = p + displacement • Translation matrix • 1 0 0 Tx • 0 1 0 Ty • 0 0 1 Tz • 0 0 0 1 • Group Activity • Tx = 3, y = 4, Tz = 5 • P1 = (1, 2, 3, 1); • P2 = Mt * P1;
Rotation • about an axis by a number of degrees • shape and size remain the same • positive rotation goes counter clockwise • parameters must be in radians • x’ = x cos(O) - y sin(O) • y’ = x sin (O) + y cos(O) • Rotate about X axis • 1 0 0 0 • 0 c -s 0 • 0 s c 0 • 0 0 0 1 • Different matrices for rotation about Y or Z
Scaling • generally about the origin • non uniform stretching along one or more axes • about a fixed point • if S > 1 then object gets bigger • Scaling matrix • Sx 0 0 0 • 0 Sy 0 0 • 0 0 Sz 0 • 0 0 0 1 • Group Activity • Sx = 1.5, Sy = 2.5, Sz = 0 • P1 = (2, 2, 2, 1); • P2 = M * P1; • Shear • We will not cover the shear transformation
Composing Transformations (5.3.2) • Concatenating matrices has the effect of applying one at a time • M = S Rx Ry Rz T • Note that matrices are multiplied in reverse order (right to left) • Warning! The order of concatenation makes a difference • Rotating about X and then Y is not the same as the inverse • A series of transformations is applied with concatenation • newObj = T * R * S * Obj • An alternative is to multiply the matrices only once to be more efficient • M = T * R * S • newObj = M * Obj • Rotation about a spcecific point instead of the origin • M = T R (-T)
Viewing Pipeline (5.6) • Several parameters must be provided to determine the final image: camera position, projection style and viewing volume. • Transformation pipeline • Keep in mind the transformations that all vertices go through and the order that it occurs. • display <-- projection <-- view <-- model <-- vertex • OpenGL has two built in transformation matrices: projection and modelview. Notice that the view and model matrices are combined into one. It is therefore critical to apply the view transformations BEFORE the model transformations.
Viewing Pipeline • objects re defined in modeling coordiates or object space (centered about the origin) • vertices are multiplied by the Model portion of the matrix to position the object in world space • vertices are then multiplied by the View portion of the matrix based on the position of the camera and converted to viewing space • vertices are multiplied by the projection matrix to create image space
OpenGL matrix operations • OpenGL maintains two global matrices • Projection - for projection paramters • Modelview - for transformation • All vertices are transformed before drawn. They are multipled by both matrices • Post multiplication is used, therefore you must perform the transformation in opposite order that you would expect • TRSp • Operations • glMatrixMode(GL_MODELVIEW) • glLoadIdentity() • glLoadMatrixf(M) • resets top matrix • glPushMatrix() • copy the top stack and place the copy on top • glPopMatrix() • replace the top matrix with the previous one • Concatenation • glMultMatrixf(M) • multiplies current Matrix times M
OpenGL • Transformations • glTranslatef(x,y,z) • multiplies current matrix to cause a translation • MV = MV * M • glRotatef(degrees, x, y, z) • multiplies current matrix to cause a rotation of the specified degrees about the specified axis. • glScalef(x, y, z) • multiplies current matrix to cause scaling about the X, Y, and Z axes
Small uisGL Example // look at ~grissom/367uisGL.h uisObject cube; uisMatrix M, S, T; // initialize structure from external object file infile.open(“cube.obj”); infile >> cube; // set transformation matrix from scene description file S.setScaling(x,y,z); T.setTranslation(x,y,z); M= T * S; cube.setTransformation(M); // transform all points at the beginning cube = M * cube; // render the object face by face
Hidden Surface Removal 5.5 • Backface Removal • You do not see the back side of an object. • Decision must be made on a face by face case with respect to the viewer position. • Hidden Surface Removal • the elimination of parts of objects that are obscured by other objects • Rotating Cube example from Ch 5.6 • Object Space algorithms attempt to dispaly objects in an appropriate order. (painters algorithm) • Image Space algorithms work on a pixel by pixel basis to determine which to display. The ordering of the objects is not important. (z-buffer)
Backface removal • Not covered in the book or by OpenGL • Identify which objects are facing towards the viewing • Calculate normal vector to face • Calculate vector from face to eye • Calculate the angle between the two • if greater than 90 then not visible • Use dot product, if <= 0 then not visible • uisGL Code uisObject Obj; uisFace F; uisVertex P1, P2, P3; uisVector V1, V2, N; V1 = P2 - P1; V2 = P3 - P1; N = V1 | V2; V1 = Eye - P1; if (V1 * N) <= 0 • not visible
Z buffer algorithm • Image space algorithm • maintain the z value for each pixel as a face is rasterized • only replace the current pixel with one that is closer to the viewer • this takes alot of memory called a Z -buffer • OpenGL does this for us • glutInitDisplayMode( GLUT_RGB | GLUT_DEPTH); • glEnable(GL_DEPTH_TEST); • glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT); • We will use this method but it does not help in wireframe mode
Walking Thru A Scene • Notice the subtle difference between rotating the object compared to moving the viewer • run cubeview.c • Rotate cube with mouse • Move viewer with key presses x, X, y, Y, z, Z