Download
1 / 61
620 likes | 842 Views
Gian Luca Pozzato & Livio Robaldo. are proud to present…. Wormhole routing. Bleah! Che schifo…. Introduzione. Tra i sistemi distribuiti, i sistemi cluster hanno trovato larga diffusione: Prestazioni buone Architettura ideale per l’esecuzione di applicazioni parallele Costi contenuti

E N D
Gian Luca Pozzato & Livio Robaldo are proud to present… Wormhole routing Bleah! Che schifo…
Introduzione • Tra i sistemi distribuiti, i sistemi cluster hanno trovato larga diffusione: • Prestazioni buone • Architettura ideale per l’esecuzione di applicazioni parallele • Costi contenuti • CLUSTER: sistema distribuito ottenuto collegando fra loro nodi indipendenti mediante una rete locale Nodi di tipo “blade” Nodi indipendenti Nodi montati su rack
Introduzione (2) • L’architettura direct network è molto utilizzata per la costruzione di sistemi cluster • Topologia di rete, flow control, switching e routing sono i concetti fondamentali legati alle direct networks • La tecnica di switching più utilizzata è il wormhole switching, che offre le performance migliori • In questo lavoro presentiamo nel dettaglio le caratteristiche e le problematiche legate al wormhole switching, oltre ad un’ampia panoramica sugli algoritmi di routing abbinati a questa tecnica • Articolo di riferimento: [Mohapatra, 1998]
In questa presentazione… • Introduzione alle diverse tecniche di switching • Wormhole routing • Topologie di rete nelle direct networks • Problema del deadlock e soluzione • Algoritmi di routing nel wormhole routing • Conclusioni • Bibliografia
Reti multicomputers (direct networks) Nodo Nodo Nodo Nodo Rete locale di interconnessione
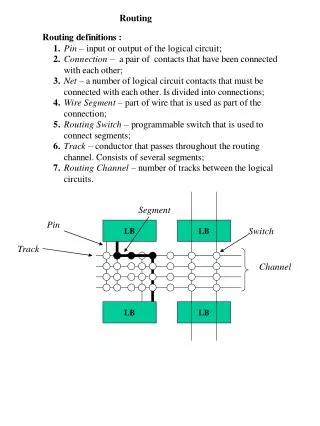
Reti multicomputers (direct networks) (2) Unità funzionali Memoria locale Processore Canali di output INTERNI Canali di input INTERNI … … Canali di output ESTERNI (canali di output) Canali di input ESTERNI (canali di input) Router … …
Reti multicomputers (direct networks) (3) • I nodi di una direct network comunicano attraverso lo scambio di messaggi • Un messaggio viene diviso in PACCHETTI • PACCHETTO = la più piccola unità di informazione. Contiene informazioni di routing e di sequenza PACCHETTO Info di routing Info di sequenza informazioni
Reti multicomputers (direct networks) (4) • Quando si parla di reti multicomputers è necessario distinguere le attività di routing, flow control e switching • ROUTING: determina il path che un pacchetto deve percorrere per raggiungere la destinazione a partire dal nodo sorgente • FLOW CONTROL: riguarda l’allocazione di canali e buffers ad un pacchetto durante il suo passaggio nel router. In caso di conflitto, la politica di flow control interviene per stabilire quale pacchetto viene bloccato a causa dell’indisponibilità di una risorsa (in possesso di un altro pacchetto) • SWITCHING: è il meccanismo che stabilisce come i dati vengono rimossi dal canale di input e posti nel canale di output 4 tecniche di switching…
Circuit switching • Prima che inizi il trasferimento dei dati viene stabilito un path dedicato tra la sorgente e la destinazione • Il path rimane allocato per l’intera trasmissione del pacchetto • Una volta iniziato il trasferimento dei dati, il messaggio non viene mai bloccato • Non è richiesta bufferizzazione dei dati (grazie al path dedicato) • Pesante overhead: durante la fase di trasferimento dei dati, tutti i canali sono riservati per l’intero trasferimento del messaggio, con conseguente degrado delle prestazioni • Questa tecnica non viene usata nei sistemi multicomputer commerciali
Packet switching • Il messaggio viene diviso in pacchetti che sono instradati ognuno sulla propria strada • L’intero pacchetto viene memorizzato in ogni nodo intermedio ed instradato al successivo nodo del path quando: • Il canale di output scelto è disponibile • Il nodo vicino ha un buffer libero per ricevere il pacchetto • Ogni pacchetto contiene le informazioni di routing e può selezionare un percorso piuttosto che un altro in base allo stato di congestione della rete • Il canale risulta occupato SOLO in fase di trasferimento di un pacchetto • Dato che ciascun pacchetto viene memorizzato in ogni nodo, il tempo per trasmetterlo dal nodo sorgente al nodo destinazione è proporzionale al numero di hops nel path; inoltre, è richiesto spazio di bufferizzazione in ciascun nodo intermedio
Virtual cut-through switching • Il pacchetto viene memorizzato nel nodo intermedio solamente se il successivo canale richiesto è occupato da un altro pacchetto • Nel caso peggiore (blocco ad ogni nodo intermedio) coincide con il packet switching • Poco usata a causa degli eccessivi costi: dato che molti messaggi potrebbero essere bloccati in un nodo, ogni nodo deve mettere a disposizione notevoli risorse di bufferizzazione
Wormhole switching • E’ una variante del virtual cut-through che consente di superare il problema della necessità di ampi spazi di bufferizzazione • Un pacchetto è trasmesso in unità dette flits • FLIT=la più piccola unità di un messaggio cui viene applicato il controllo di flusso • L’header flit contiene tutte le informazioni necessarie per l’esecuzione del routing, compreso l’indirizzo di destinazione; gli altri flits contengono soltanto dati • I flit vengono trasmessi “in fila” in modo canalizzato • Quando l’header flit viene bloccato, il blocco si propaga a tutti i flit che seguono, i quali vengono bufferizzati nei nodi intermedi
Wormhole switching (2) MESSAGGIO PACCHETTO FLITS D D D D D D D D D H
Canali fisici di collegamento Buffer di output Buffer di input NODI del cluster Routing in sistemi Cluster Flit 3 2 3 1 2 3 2 1 1 3 2 1 3 2 2 1 3 2 3 1 2 1 3
? • Quando risiede in un canale di input • Quando risiede in un canale di input • Quando risiede in un canale di input • Quando risiede in un canale di input • Quando gli viene allocato un buffer di output • Quando gli viene allocato un buffer di output • Quando gli viene allocato un buffer di output • Quando gli viene allocato il canale fisico • Quando gli viene allocato il canale fisico Un flit può avanzare... Avanti Savoia!
Wormhole switching: vantaggi e svantaggi Vantaggi: • Ogni nodo deve memorizzare un solo flit (anche se alcune implementazioni richiedono la memorizzazione di flit multipli per migliorare le prestazioni) • La limitata richiesta di spazio di bufferizzazione rende inferiori costi e dimensioni del sistema multicomputer. Svantaggi: • Il solo header flit conserva le informazioni di routing: se non può avanzare nella rete, il blocco deve essere propagato a tutto il pacchetto. • Il deadlock è una conseguenza di questo fatto.
Routing in sistemi Cluster: richiesta dello stesso buffer di output Flit 2 3 Ops.. 1 2 3 3 2 1 3 1 2 2 1 3 2 1 3 1 2 3 2 1 3 1 2 3 3 2 1 2 1 3 1 2 3 1 3 2 3 2 1 1 3 2 Flit 3 2 • Un verme passa, l’altro si blocca • Il blocco si propaga all’indietro a tutti i flit del pacchetto • Quando il primo verme è passato passa anche l’altro
Deadlock 2 1 5 4 3 1 2 1 3 2 1 4 1 3 2 E, invece, il verde non continua...perchè qui vuole un buffer in cui c’è un flit del blu: si blocca anche lui 1 3 4 2 1 4 3 2 5 1 2 1 2 3 1 Ah! Il blu ed il verde vogliono lo stesso buffer di output. Il verde continua ed il blu si blocca Deadlock!
Indirect I nodi sono collegati tra loro attraverso degli switch Direct I nodi sono collegati tra loro attraverso links point to point o diretti Maggiore scalabilità: soluzione più utilizzata Topologie di rete • I nodi del cluster sono interconnessi tra loro attraverso una rete. • I nodi comunicano tra loro attraverso scambio di messaggi che vengono inviati lungo la rete. • La scelta della tecnologia e della topologia della rete incide pesantemente sulle prestazioni del cluster. Le topologie di rete possono essere classificate in Il wormhole switching viene utilizzato in tutte e due, ma noi vedremo solo topologiedirect
Topologie di rete (2) • Le topologie di rete possono essere descritte attraverso un grafo in cui i vertici sono i nodi del cluster e gli archi sono i canali fisici che li collegano • n-dimensional mesh: n dimensioni e ki nodi nella dimensione i (i=0, 1, …, n-1) • k-ary n-cube: k nodi in ciascuna delle n dimensioni, con wraparound connections ESEMPI mesh 3D con k=3 in ciascuna dimensione 5-ary 2-cube (torus)
Topologie di rete (3) • Nella realtà, vengono utilizzate soprattutto tre sottoclassi: • L’hypercube: n-dimensional mesh con kfisso a 2 in ogni dimensione (es. Intel iPSC/1, nCUBE) • Il torus: un k-ary n-cube con nfisso a 2 (es. Cray T3D) • Mesh 2D (es. Intel Paragon) ESEMPI di mesh 2D: ESEMPI di hypercube: 2-cube (n=2) 3-cube (n=3) K=4 K=8
Chiaramente… • Il diametro deve essere minimizzato • Il bisection cut deve essere massimizzato Topologie di rete (4) • In generale un n-dimensional mesh è una topologia asimmetrica: nei nodi al centro della maglia abbiamo una densità di traffico maggiore rispetto a quella nei nodi sulla periferia. • Hypercube e torus, invece, sono topologie simmetriche: ogni nodo ha la stessa connettività con gli altri nodi. Vediamo l’effetto che questo ha sui parametri di una rete…ricordo che essi sono: Diametro: lunghezza del più lungo shortest path tra due qualsiasi nodi della rete Bisection cut: numero di link che deve essere “tagliato” per dividere la rete in due metà uguali.
(2n) (2n+1) (22n-1) 2nx2n2DMesh >>2nx2n2DTorus >>2nHypercube Bandwidth: Morale della favola: a parità di costo, l’hypercube ha un diametro minore del Torus che ha un diametro minore della mesh. Un diametro minore significa cammini più corti…e quindi meno latenza e più throughput. Topologie di rete (5) Vediamo un confronto…a parità di nodi n, si ha che: Diametro: 2nx2n2DMesh >>2nx2n2DTorus >>2nHypercube 2nx2n2DMesh <<2nx2n2DTorus <<2nHypercube Bisection cut: Esiste anche una stima del costo della rete: la bisection density, che è data dal prodotto del bisection cut e della banda del canale. Sembrerebbe quindi che la topologia hypercube sia una delle più costose…però bisogna osservare che, essendo l’hypercube una struttura più “fitta” di links, è necessaria molta meno banda rispetto ad un torus (ed ancora meno rispetto alla mesh) per ottenere le stesse prestazioni (latenza e throughput). Quindi…
Ah già…dimenticavo… Cosa sono latenza e throughput? latenza: tempo che la rete impiega a recapitare un messaggio. throughput: massimo tasso di messaggi che può essere immesso nella rete senza che la latenza media cresca (la rete va in saturazione). Nelle reti cluster, come si è visto, l’unità di trasferimento è il flit; ne consegue che se Tc (tempo di ciclo) è il tempo che un flit impiega a fare un hop e se D è il numero di nodi attraversati, la latenza di tutto il pacchetto di dimensione L è… Tm(L) = Tc x (D + L / W) Dove W è la dimensione di ogni singolo flit. Diminuendo il diametro, quindi, diminuiscono i valori D nei trasferimenti di pacchetti tra i nodi del cluster e, quindi, diminuisce la latenza.
Source Routing Distributed Routing VS Deterministici Adattativi VS Minimali Non minimali VS Algoritmi di routing Un algoritmo di routing, in generale, si può classificare in vari modi… L’intero cammino sorgente-destinazione è stabilito sul nodo sorgente prima che il messaggio sia spedito Il cammino sorgente-destinazione viene stabilito di volta in volta dai nodi intermedi attraverso cui i il messaggio transita I messaggi sono sempre instradati lungo uno dei cammini più corti tra sorgente e destinazione I messaggi sono instradati attraverso qualsiasi cammino tra sorgente e destinazione Il cammino sorgente-destinazione è unico ed è determinato solo sulla base degli indirizzi di sorgente e destinazione Il cammino sorgente-destinazione viene stabilito di volta in volta dai nodi intermedi e dipende dalle condizioni attuali della rete (guasti, traffico, …)
E’ possibile dimostrare che il deadlock non può mai verificarsi se vengono rispettati i teoremi che ci apprestiamo a vedere (uno per gli algoritmi deterministici e l’altro per gli adattativi). Tali teoremi costituiscono delle condizioni necessarie e sufficienti per il deadlock avoidance. Teorema: Condizione necessaria e sufficiente per il deadlock avoidance in algoritmi deterministici è che il grafo di dipendenza dei canali non abbia cicli. Deadlock free routing Sia gli algoritmi deterministici che gli algoritmi adattativi possono essere Deadlock free La tecnica solitamente utilizzata per risolvere il problema del deadlock è quella del Deadlock avoidance Questo teorema è solo condizione sufficiente per gli algoritmi adattativi...
Teorema: Condizione necessaria e sufficiente per il deadlock avoidance in algoritmi adattativi è che esista una sub-routing function R1 connessa e priva di cicli nel suo extended channel dependency graph. Deadlock free routing (2) Magari ci vuole qualche definizione... • Una routing function R:NxNp(C) è una funzione che associa, ad ogni coppia di • nodi (ns, nd) NxN, l’insieme dei canali p(C) su cui si può spedire un flit da ns per • raggiungere nd. • Una subrouting function R1 di R è una funzione che implementa un sottoinsieme • delle associazioni di R. • Una routing\subrouting functionR è connessa se per ogni coppia di nodi (ns, nd) si • ha che R(ns, nd) non è vuoto. • Un extended channel dependency graph della routing function R è un grafo i cui • nodi sono i canali presenti in R ed in cui esiste un arco (ci, cj) se R permette un • cammino tra due nodi che passa per ci e cj (e ci precede cj in tale cammino).
CH0 n0 n1 CA0 CA3 CA1 CH1 n3 n2 CA2 CH2 Un esempio... Invece che vedere la dimostrazione dei due teoremi [Duato, 1994], vediamo un esempio del secondo...che è più complicato... Consideriamo la seguente topologia... Un semplice algoritmo che rispetta il secondo teorema: • Se il nodo corrente ni è uguale al nodo destinazione nj, consuma il messaggio. • Altrimenti, spedisci il flit sul canale CAi (i j) o sul canale CHi (j > i) Tale algoritmo è ovviamente adattativo, perchè, in quasi tutte le situazioni, ho più di un canale in cui scegliere di spedire il flit.
CH0 n0 n1 Il grafo delle dipendenze è... CH2 CH0 CA3 CH1 CA1 CA2 CA0 Topologia CA3 CA1 CH1 n3 n2 CA2 CH2 Un esempio... Consideriamo ora subrouting function di R, che chiamiamo R1 e che è uguale ad R eccetto che... • CA0 non viene utilizzato. • CA1 e CA2 possono essere usati solo per spedire flits ad una destinazione con indice più piccolo del nodo corrente. E’ privo di cicli!!! Per il teorema visto, questo algoritmo adattativo non entra mai in deadlock Da n3 posso raggiungere n0, n1, n2 passando per CH0 e CH1 I canali CHn possono spedire solo a nodi con indici superiori ad n CA1 può raggiungere solo n0 passando solo da CA2 e CA3 Da n2 posso raggiungere solo n0 ed n1 passando per CA3 e CH0
Wormhole routing deterministico • Il path è determinato SOLO dalla coppia sorgente-destinazione • Per ogni coppia sorgente-destinazione, tutti i pacchetti seguono il medesimo percorso • Idea di base: il deadlock è prevenuto ordinando i canali che un messaggio deve attraversare • Un messaggio percorre i canali in ordine ascendente o discendente, evitando dei cicli nel grafo delle dipendenze dei canali • Un esempio di routing deterministico è il dimension-order routing [Dally e Seitz, 1987]
Dimension-order routing • Schema di routing deterministico in cui il path selezionato attraversa le dimensioni della rete in sequenza • Le dimensioni della rete sono preventivamente organizzate mediante un ordine monotono x1, x2, …, xn • Il messaggio compie prima tutti gli spostamenti nella direzione x1, quindi nella direzione x2,…, fino al raggiungimento della destinazione • A questo punto, il messaggio attraversa la rete nella successiva dimensione, fino a che non raggiunge la destinazione • Il deadlock è scongiurato dal fatto che i messaggi non attraversano MAI la rete nella direzione inversa dell’ordine di dimensione
Dimension-order routing su hypercube • I nodi dell’n-cube vengono rappresentati da una stringa binaria di n bit • L’indirizzo di destinazione viene memorizzato nell’header flit • Quando un nodo riceve un messaggio esegue l’XOR tra il proprio indirizzo e l’indirizzo della destinazione: • Se è zero, consuma il messaggio • Se è diverso da zero, inoltra il messaggio nella dimensione corrispondente all’uno del risultato più a destra (o più a sinistra) • Si parla di e-cube routing ed è una tecnica minimale • Vediamo un esempio…
D S S D Dimension-order routing su hypercube (2) 010 101 XOR 111 111 110 010 011 011 111 101 XOR 010 011 101 110 110 100 001 011 001 001 000 101 XOR 100 100 101 101 001
Dimension-order routing su mesh 2D • Chiamato routing XY, è minimale • Le due dimensioni della mesh sono etichettate con X e Y • Un messaggio viene prima inoltrato completamente nella direzione X, quindi viene inoltrato completamente nella direzione Y • Nelle mesh multidimensionali si esegue il medesimo algoritmo, completando il routing in una direzione prima di passare alla successiva (le dimensioni sono ordinate) • Questa tecnica è deadlock-free
Dimension-order routing su mesh 2D (2) 1 7 Possibili turns 0 4 6 2 Direzione Y 3 0 Direzione X
Dimension-order routing (conclusione) • Esistono algoritmi di routing minimali per k-ary n-cubes che sfruttano i canali virtuali [Dally e Seitz, 1987] • In ogni caso, il dimension-order routing è adatto ad una distribuzione uniforme del traffico sulla rete (sceglie il cammino minimo per tutto il messaggio) • Non sfrutta la possibilità di cammini multipli tra coppie di nodi sorgente-destinazione • Non è adatto a gestire: • Guasti sulla rete • Congestione della rete
Totalmente adattativi VS Parzialmente adattativi Wormhole routing adattativo • Gli algoritmi deterministici calcolano uno e un solo cammino tra sorgente e destinazione • Per gestire guasti e reagire opportunamente alla congestione della rete è necessario che gli algoritmi di routing calcolino dei cammini alternativi per i messaggi • Gli algoritmi che offrono questa opportunità sono detti ADATTATIVI che si dividono in: I messaggi vengono instradati su un sottoinsieme dei possibili cammini tra sorgente e destinazione Tutti i possibili cammini tra sorgente e destinazione sono messi a disposizione per l’instradamento dei messaggi
Fully-adaptive: algoritmo PFNF • Vediamo nel dettaglio un altro esempio: l’algoritmo positive-first-negative-first (PFNF) per mesh bi-dimensionali, illustrato in [Upadhyay et al., 1997] • L’algoritmo usa due canali virtuali per ciascun canale fisico • I messaggi vengono inoltrati nelle due reti virtuali in modo da distribuire uniformemente il carico ed ottenendo un algoritmo di routing fully-adaptive • Utilizzando il teorema di Duato si può provare che l’algoritmo PFNF è deadlock free
Fully-adaptive: algoritmo PFNF (2) • La rete fisica è logicamente divisa in due reti virtuali: VN1 e VN2 • Due canali virtuali associati al medesimo canale fisico si trovano in reti virtuali diverse • La rete virtuale VN1 è gestita mediante le restrizioni dell’algoritmo positive first • La rete virtuale VN2 è gestita mediante le restrizioni dell’algoritmo negative first • Quando il nodo destinazione si trova nelle direzioni <+x, +y> e <-x, -y>, il messaggio viene instradato senza restrizioni • Quando il nodo destinazione si trova nelle direzioni <-x, +y> o <+x, -y> vengono applicate le restrizioni positive first e negative first
Fully-adaptive: algoritmo PFNF (3) • … • 2. Se tutti gli elementi in Routing_tag ≥0 • Se Routing_tag[0] >0 • aggiungi a VC i canali: • ► vcVN1((x0 , x1),(x0 +1, x1)) • ► vcVN2((x0 , x1),(x0 +1, x1)) • Se Routing_tag[1] >0 • aggiungi a VC i canali: • ► vcVN1((x0 , x1),(x0 ,x1+1)) • ► vcVN2((x0 , x1),(x0 ,x1+1)) • … • VC=Ø • Se tutti gli elementi in Routing_tag ≤0 • Se Routing_tag[0] <0 • aggiungi a VC i canali: • ► vcVN1((x0 , x1),(x0 -1, x1)) • ► vcVN2((x0 , x1),(x0 -1, x1)) • Se Routing_tag[1] <0 • aggiungi a VC i canali: • ► vcVN1((x0 , x1),(x0 ,x1-1)) • ► vcVN2((x0 , x1),(x0 ,x1-1)) • … … 3c. Se Routing_tag[1] >0 aggiungi a VC il canale: ► vcVN1((x0 , x1),(x0 , x1 +1)) … Nodo sorgente: (x0 , x1) … 3a. Se Routing_tag[0] >0 aggiungi a VC il canale: ► vcVN1((x0 , x1),(x0 +1, x1)) … Nodo destinatario: (d0 , d1) Se vi è un solo canale in VC, lo restituisce. Altrimenti, ne sceglie uno a random o impiegando un multiplex-turn bias (=se possibile, si cerca di proseguire nella direzione intrapresa, evitando di compiere dei turni) SE di - xi >0 ALLORA METTI 1 SE di - xi <0 ALLORA METTI -1 SE di - xi =0 ALLORA METTI 0 … 3b. Se Routing_tag[0] <0 aggiungi a VC il canale: ► vcVN2((x0 , x1),(x0 -1, x1)) … … 3d. Se Routing_tag[1] <0 aggiungi a VC il canale: ► vcVN2((x0 , x1),(x0 , x1 -1)) return VC 1 Routing_tag: 1 Routing_function: VN1: VN2: Selection_function(VC):
Fully-adaptive: algoritmo PFNF (4) • Vediamo un esempio di funzionamento: il mittente del messaggio è (2,2), il destinatario è (5,0) (2,2) (5,0)
Fully adaptive: conclusioni • La flessibilità garantita dai meccanismi di routing adattativo migliorano le performance, ma richiedono una crescita della complessità di gestione da parte dell’hardware, che rallenta notevolmente i router • E’ stato osservato che gli algoritmi adattativi non migliorano necessariamente le prestazioni di una rete a bassa dimensione • Un netto miglioramento si riscontra nelle reti ad alta dimensione, tipo hypercubes, e nelle reti in cui il traffico non è distribuito uniformemente • Spesso ci si accontenta di un grado di adattabilità più basso, in cambio di una gestione più semplice: algoritmi parzialmente adattativi
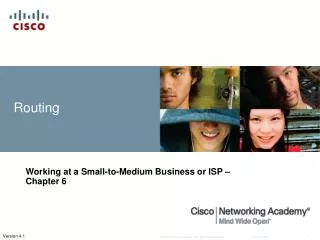
Partially adaptive routing • Glass e Ni hanno proposto il “turn model”, sulla base del quale sono stati sviluppati diversi algoritmi parzialmente adattativi • Soffermiamoci ancora sulle mesh 2-D: secondo il modello, ci sono otto possibili turni • L’algoritmo xy previene il deadlock impedendo 4 turns:
Partially adaptive routing (2) • Per impedire il deadlock è sufficiente impedire 2 soli turni, uno in ciascun ciclo • A seconda di quali turns vengono permessi/impediti si ottengono i seguenti algoritmi parzialmente adattativi: Algoritmo west-first: Algoritmo north-last: Algoritmo negative-first: