Download

1 / 67
690 likes | 966 Views
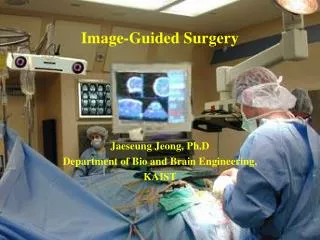
Image Guided Navigation System for Minimally Invasive Surgery. Hua Zhong October 2007. Outline. Minimally Invasive Surgery Registration and Navigation System Overview Ultrasound Virtual Touch 4D Registration Non-rigid Registration Visualization. Minimally Invasive Surgery.

E N D
Image Guided Navigation System for Minimally Invasive Surgery Hua Zhong October 2007
Outline • Minimally Invasive Surgery • Registration and Navigation System Overview • Ultrasound Virtual Touch • 4D Registration • Non-rigid Registration • Visualization
Minimally Invasive Surgery What is minimally invasive surgery Benefits & limitations
Minimally Invasive Surgery Catheter
Registration & Navigation Systems What are currently available systems How do they work Limitations
Registration & Navigation Systems CT image segmented 3D model reconstructed from CT
Catheter Bed Magnetic Transmitter Catheter Tip Example system: Biosense Carto Merge System
Registration & Navigation Systems • Limitations 1: radiation • Limitations 2: manually collect surface points • Limitations 3: low accuracy
Ultrasound Virtual Touch Touch with ultrasound Ultrasound image plane thickness correction Registration with virtual touch points
Ultrasound Virtual Touch • Position Sensor Video
Ultrasound Virtual Touch • Virtual Touch Video
Ultrasound Virtual Touch Virtual Touch 12000+ points ~3 minutes Manual physical touch 88 points ~20 minutes
Ultrasound Image Thickness • Thickness of ultrasound image plane, also called beam width: 5-8mm • Size of left atrium: 70-100mm • First we need to measure the thickness
Measure Image Thickness Richard, B.: Test object for measurement of section thickness at us. Radiology 211 (1999) 279-282 Skolnick, M.: Estimation of ultrasound beam width in the elevation (section thick-ness) plane. Radiology 180 (1991) 286-288 Band Width 45˚ Transducer
Measure Image Thickness • Precise built of model • Precise motion of the plane or multiple planes • Can we reduce all those restrictions?
Measure Image Thickness Transducer
Measure Image Thickness Measure βin ultrasound images
Measure Image Thickness W is the width of the white band in ultrasound image αis the angle of the sloped plane which can be measured α= 45˚ , β= 0˚ : Thickness = w
Measure Image Thickness • Move the slope around • Measure thickness at various depth • Interpolate sample thickness to generate a continuous function: Thickness = f(depth)
Correct Error from Image Thickness 1. Position and orientation of the ultrasound image plane. 2. Thickness of the image at point o. 3. Local normal of the object surface. If we know these 3 things, we can correct the error!
Correct Error from Image Thickness • Position and orientation of the ultrasound image plane. • Thickness of the image at point o. • Local normal of the object surface. Yes Yes ?
Correct Error from Image Thickness Estimate local surface normal • By fitting local registration points • By pre-registration
Correct Error from Image Thickness Estimate local surface normal Estimated surface normal will only be used to determine which of P1 or P2 is the real surface point. It doesn’t need to be very accurate.
Correct Error from Image Thickness • Position and orientation of the ultrasound image plane. • Thickness of the image at point o. • Local normal of the object surface. Yes Yes Yes
Correct Error from Image Thickness • Experiment Design: • Different group with various average intersecting angles
Correct Error from Image Thickness • The error is dependent on intersecting angle: smaller the angle larger the error b b o o o’ o’ a a Prager, R.W., Rohling, R.N., Gee, A.H., Berman, L.: Rapid calibration for 3-d freehand ultrasound. In: Ultrasound in Medicine and Biology. (1998) 24(6):855-869
Correct Error from Image Thickness • Experiment Design: • Different group with various average intersecting angles • Register to the surface model without correction • Register to the surface model with correction • Separate evaluation point set
Correct Error from Image Thickness • Expected result Un-correct points Registration Error Corrected points Intersecting angle
Correct Error from Image Thickness • Registration error around 1.8-1.9mm • Average accuracy boost: 20.45% • Consistent accuracy across the spectrum
Conclusion for “Virtual Touch” • Faster • More accurate • More consistent
4D Registration Time-space registration for heart model with full motion.
4D Registration 4D Heart Model Movie
4D Registration • Capture multiple 3D models during a cardiac cycle
4D Registration • Heart shape changes from cardiac cycle • Heart shape also change from breath cycle Lung Left atrium