Download
1 / 1
10 likes | 144 Views
LAND VEHICLE FOR EDUCATION: CHASSIS, MOTOR, POWER. P11211. 2010-2/2010-3. MECHANICAL ENGINEERING DEPARTMENT DR. EDWARD HENSEL (SPONSOR) PHIL BRYAN (TEAM GUIDE) VINCE BUROLLA AND LEO FARNAND (INDUSTRY ADVISORS). MATTHEW O’NEILL (ME). JESSE KEYSER (ME). RYAN SUTTON (ME). JON FABIAN (EE).

E N D
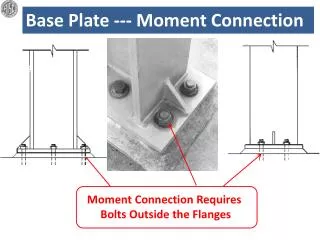
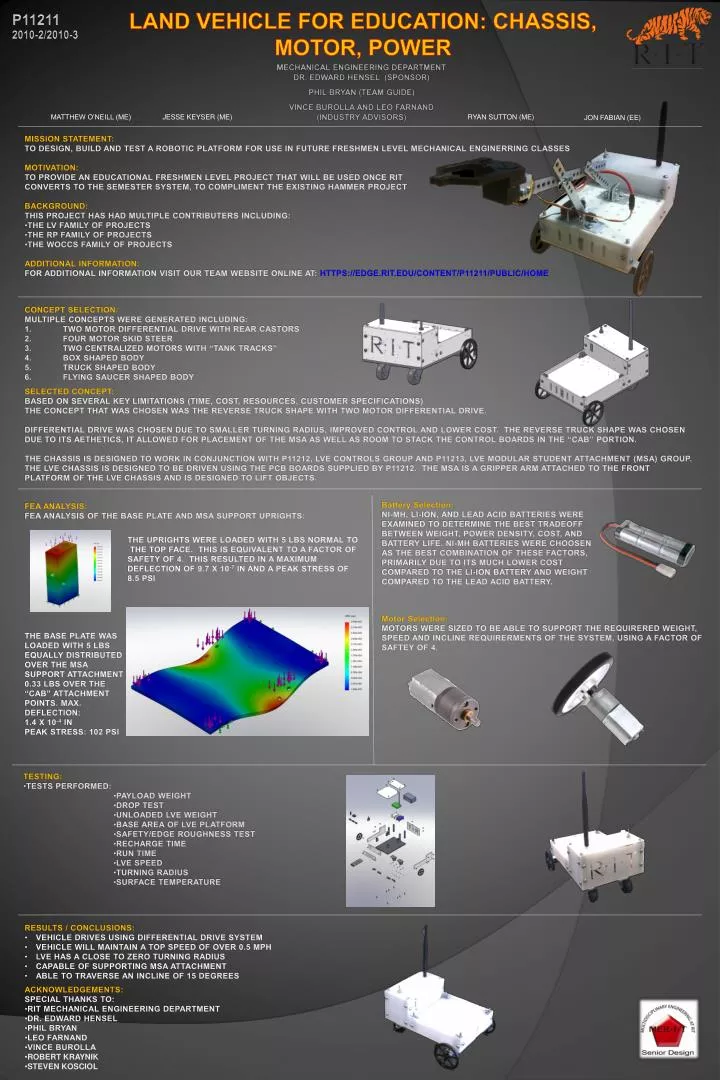
LAND VEHICLE FOR EDUCATION: CHASSIS, MOTOR, POWER P11211 2010-2/2010-3 MECHANICAL ENGINEERING DEPARTMENT DR. EDWARD HENSEL (SPONSOR) PHIL BRYAN (TEAM GUIDE) VINCE BUROLLA AND LEO FARNAND (INDUSTRY ADVISORS) MATTHEW O’NEILL (ME) JESSE KEYSER (ME) RYAN SUTTON (ME) JON FABIAN (EE) • MISSION STATEMENT: • TO DESIGN, BUILD AND TEST A ROBOTIC PLATFORM FOR USE IN FUTURE FRESHMEN LEVEL MECHANICAL ENGINERRING CLASSES • MOTIVATION: • TO PROVIDE AN EDUCATIONAL FRESHMEN LEVEL PROJECT THAT WILL BE USED ONCE RIT • CONVERTS TO THE SEMESTER SYSTEM, TO COMPLIMENT THE EXISTING HAMMER PROJECT • BACKGROUND: • THIS PROJECT HAS HAD MULTIPLE CONTRIBUTERS INCLUDING: • THE LV FAMILY OF PROJECTS • THE RP FAMILY OF PROJECTS • THE WOCCS FAMILY OF PROJECTS • ADDITIONAL INFORMATION: • FOR ADDITIONAL INFORMATION VISIT OUR TEAM WEBSITE ONLINE AT: HTTPS://EDGE.RIT.EDU/CONTENT/P11211/PUBLIC/HOME • CONCEPT SELECTION: • MULTIPLE CONCEPTS WERE GENERATED INCLUDING: • TWO MOTOR DIFFERENTIAL DRIVE WITH REAR CASTORS • FOUR MOTOR SKID STEER • TWO CENTRALIZED MOTORS WITH “TANK TRACKS” • BOX SHAPED BODY • TRUCK SHAPED BODY • FLYING SAUCER SHAPED BODY • SELECTED CONCEPT: • BASED ON SEVERAL KEY LIMITATIONS (TIME, COST, RESOURCES, CUSTOMER SPECIFICATIONS) • THE CONCEPT THAT WAS CHOSEN WAS THE REVERSE TRUCK SHAPE WITH TWO MOTOR DIFFERENTIAL DRIVE. • DIFFERENTIAL DRIVE WAS CHOSEN DUE TO SMALLER TURNING RADIUS, IMPROVED CONTROL AND LOWER COST. THE REVERSE TRUCK SHAPE WAS CHOSEN • DUE TO ITS AETHETICS, IT ALLOWED FOR PLACEMENT OF THE MSA AS WELL AS ROOM TO STACK THE CONTROL BOARDS IN THE “CAB” PORTION. • THE CHASSIS IS DESIGNED TO WORK IN CONJUNCTION WITH P11212, LVE CONTROLS GROUP AND P11213, LVE MODULAR STUDENT ATTACHMENT (MSA) GROUP. • THE LVE CHASSIS IS DESIGNED TO BE DRIVEN USING THE PCB BOARDS SUPPLIED BY P11212. THE MSA IS A GRIPPER ARM ATTACHED TO THE FRONT • PLATFORM OF THE LVE CHASSIS AND IS DESIGNED TO LIFT OBJECTS. Battery Selection: NI-MH, LI-ION, AND LEAD ACID BATTERIES WERE EXAMINED TO DETERMINE THE BEST TRADEOFF BETWEEN WEIGHT, POWER DENSITY, COST, AND BATTERY LIFE. NI-MH BATTERIES WERE CHOOSEN AS THE BEST COMBINATION OF THESE FACTORS, PRIMARILY DUE TO ITS MUCH LOWER COST COMPARED TO THE LI-ION BATTERY AND WEIGHT COMPARED TO THE LEAD ACID BATTERY. FEA ANALYSIS: FEA ANALYSIS OF THE BASE PLATE AND MSA SUPPORT UPRIGHTS: THE UPRIGHTS WERE LOADED WITH 5 LBS NORMAL TO THE TOP FACE. THIS IS EQUIVALENT TO A FACTOR OF SAFETY OF 4. THIS RESULTED IN A MAXIMUM DEFLECTION OF 9.7 X 10-7 INAND A PEAK STRESS OF 8.5 PSI THE BASE PLATE WAS LOADED WITH 5 LBS EQUALLY DISTRIBUTED OVER THE MSA SUPPORT ATTACHMENT POINTS AND 0.33 LBS OVER THE “CAB” ATTACHMENT POINTS. MAX. DEFLECTION: 1.4 X 10-4 IN PEAK STRESS: 102 PSI Motor Selection: MOTORS WERE SIZED TO BE ABLE TO SUPPORT THE REQUIRERED WEIGHT, SPEED AND INCLINE REQUIRERMENTS OF THE SYSTEM, USING A FACTOR OF SAFTEY OF 4. • TESTING: • TESTS PERFORMED: • PAYLOAD WEIGHT • DROP TEST • UNLOADED LVE WEIGHT • BASE AREA OF LVE PLATFORM • SAFETY/EDGE ROUGHNESS TEST • RECHARGE TIME • RUN TIME • LVE SPEED • TURNING RADIUS • SURFACE TEMPERATURE • RESULTS / CONCLUSIONS: • VEHICLE DRIVES USING DIFFERENTIAL DRIVE SYSTEM • VEHICLE WILL MAINTAIN A TOP SPEED OF OVER 0.5 MPH • LVE HAS A CLOSE TO ZERO TURNING RADIUS • CAPABLE OF SUPPORTING MSA ATTACHMENT • ABLE TO TRAVERSE AN INCLINE OF 15 DEGREES • ACKNOWLEDGEMENTS: • SPECIAL THANKS TO: • RIT MECHANICAL ENGINEERING DEPARTMENT • DR. EDWARD HENSEL • PHIL BRYAN • LEO FARNAND • VINCE BUROLLA • ROBERT KRAYNIK • STEVEN KOSCIOL