Download
1 / 12
120 likes | 134 Views
One-page procedure for gluing projective platforms for ATLAS chambers, including required tools and materials, step-by-step instructions, and contact information for assistance.

E N D
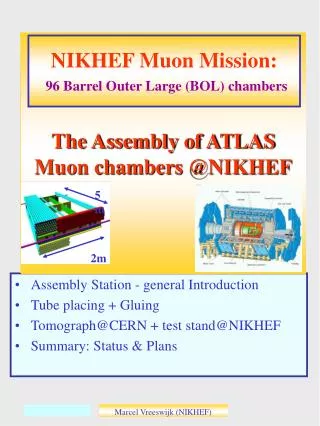
Projective platforms gluing for ATLAS chambers • one page procedure for the gluing • Required tools and material • the projective template and the projective platform • procedure steps • control of the gluing J.-Ch. Barrière, V. Gautard, P. Ponsot, Y. Reinert, Ph. Schune for the Saclay muon hardware group CEA Saclay DAPNIA 91191 Gif sur Yvette cedex France In case of problems/difficulties with projective tools, please contact us: Jean-Christophe Barrière:(33) 1-69-08-68-54 email: barriere@dapnia.cea.fr Valérie Gautard: (33) 1-69-08-45-96 , email: vgautard@cea.fr Claude Guyot: (33) 1-69-08-55-74, email: guyot@hep.saclay.cea.fr Patrick Ponsot: (33) 1-69-08-79-30, email: ponsot@dapnia.cea.fr Philippe Schune: (33) 1-69-08-70-61, email: schune@hep.saclay.cea.fr Fax # (valid for all of us): (33) 1-69-08-64-28
Z X ruler X • Slow glue (DP-490) • Fast glue (DP-110) • Slow glue • Fast glue • Slow glue One page information for positioning and gluing projective platforms 1) The MDT multilayer carrying the praxial platforms is completed and positioned on the top. The chamber is still on the granite table 2) Remove all praxial black boxes. granite table 3) Fix a projective platform on each “projective template”. Screwing torque= 0.2 N.m max. (hand screwing !) projective platform projective template 4) Put the two “praxial-projective fork” in position in the praxial platform, always on the RO side of the chamber. 5) Put the “X ruler” on the tubes in contact with the two “praxial-projective fork”. X ruler praxial-projective fork 7)after a careful cleaning of the MDT tubes AND projective platforms, put the two glues on the tube at the location of the projective platforms: 6) fix the “X ruler” in position using the screw on each “praxial-projective fork”. X-ruler 8) put the projective template with its projective platform in its position (see engineer drawing for the correct position). 9) check the labeling on the ruler to be sure that the template is correctly positioned. 10)(not shown) put the calibrated MDT tube (already used for praxial platform positioning) in contact with the first projective template. This is necessary in order to have a X-stop for the second projective template, on the other side of the chamber. Before positioning the projective platform, don’t forget to put glue after a careful cleaning, as in step 7.
2) Required tools and materials • 2 projective templates and 2 projective platforms • 2praxial-projective forks • 1 X-ruler, with chamber name 2 “control templates” each associated with its “common masks support” • 2 type of glues: slow glue (DP-490) and fast glue (DP-110) • a calibrated MDT tube (the one already used for praxial platforms positioning, in order to have X-stop on both chamber sides • a screwing torque to control screwing of platform on template
3) The projective template and the projective platform Hole to set the template position on the proper tube using the X-ruler Sphere on end-plugs Sphere on tubes 3 spheres defining the projective platform position. Pin which will be in contact with the X-ruler Flat-pin on end-plug dashed lines show which pin of the platform is in contact with which positioning sphere Sphere on tubes Projective platform Pin which will be in contact with the calibrated tube (already used for praxial), in order to fix the X position of platform position on the HV side. hole for tomograph scan
4.1) Procedure steps 1) The MDT multilayer carrying the praxial platform is just completed and positioned on the top: The last layer of the other multilayer is on the assembly granite table comb and ready to be glued. 2) Remove all praxial black boxes. granite table 3) Put each projective platform in position on its template. Screwing torque= 0.2 N.m max. (hand screwing !)
TOP VIEW X-ruler praxial-projective forks The X-ruler is fixed in its correct position 4.2) Procedure steps (cont’d) 4) On the RO side of the chamber, put a “praxial-projective forks” on each praxial platform. These tools are needed in order to connect X of the praxial platforms to X of the projective platforms (tolerance ~ ± 200mm). Check that the 6 positioning pins on the “fork” are in contact with the praxial platform. SIDE VIEW X-stop needed for the X-ruler X-ruler praxial-projective forks long beam praxial platform 5) Put the X-ruler directly on top of the MDT tubes, in contact with the X-stop of the two “praxial-projective forks” (on each side). Check that the chamber name written on the X-ruler is visible. 6) Fix, by hand, the X-ruler thanks to the screw on the “praxial-projective forks”.
4.3) Procedure steps (cont’d) 7)Do a careful cleaning of MDT tubes where the platforms will be glued AND on the projective platform side to be glued. Put the two glues (slow and fast) on top of 5 MDT tubes, where the projective platform should be glued. This has to be done for both projective platforms, so on each side of the chamber: RO side where the X-ruler is and on the symmetric position on HV side. Make sure that the glue strips go slightly further than the platform size. • Slow • Fast • Slow • Fast • Slow slow glue: DP-490, fast glue: DP-110
4.4) Procedure steps (cont’d) 8) put the first projective template (RO side) with its projective platform in its position. The MDT tubes receiving the sphere are given by the X-ruler (check also on the engineering drawing). RO side 9)check the labeling on the ruler to be sure that the template is positioned on the proper tubes. Check also that everything is in its correct position: good contact between template X-pin and X-ruler, etc… 10) put the calibrated MDT tube (already used for praxial platform positioning) in contact with the outside X-pin of the RO projective template. This tube is needed in order to have a X-stop for the second projective template, on the other side of the chamber (HV side). Then, put the second template with its platform (not shown).But before positioning the second projective platform, don’t forget to put glue on MDT tubes after a careful cleaning, as in step 7. Wait at least 1 hour before removing the tools.
4.5) Platforms for chambers at position z=+-1 For chambers in position 1 (close to eta=0) special positions of the projective platforms are needed which require additional steps. The platform carrying the projective sensors are placed far away from the end-plugs. Additional platforms properly positioned w.r.t. the end-plugs are added at the corners. These steps are describe below: 10)Glue the platforms at the low z corners (same procedure as for the standards platforms). 11)After glue curing of the corner projective platforms (at least 1 hour), remove the X-ruler and the two praxial-projective forks. Then, put a small calibrated tube in contact with each previously glued projective platforms at the corner of the chamber. This will give a X reference for these new platforms. Positioning tool (and platform) in special position in the middle of the chamber, w.r.t. corner platform. Here, the X-reference is done using a small calibrated tube, directly on contact with the corner platform and with the sphere on end-plug of the template. already glued platform on corner of the chamber Wait at least 1 hour before removing the tools. Sphere on end-plugs
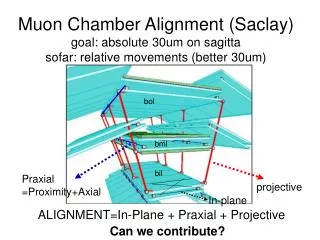
X ATLAS Z ATLAS 5.1) Control of the gluing: hardware When a projective platform have been glued on a MDT chamber, it is mandatory to check if the gluing have been done correctly. The following procedure explains how to do this important control: 1)the projective platform have been glued and the positioning tool have been removed; the X-ruler is still in position, 2) put the “common masks support” on top of the projective platform, 3) put the “control template” equipped with 2 lens+camera in position in contact with the X-ruler. This “control template” is the one which have the same shape than the positioning template. 4)record the twoRasnik images. To compare these images to calibrated ones we provide a software program which calculate the platform position w.r.t. tubes. The results is automatically record. (3) control template lens+camera along X lens+camera along Z (2) common masks support (1) projective platform already glued The following pictures illustrate the system when in position, ready to record Rasnik images (H8 prototype): control template control template mask “common masks support” put directly on the projective platform lens+camera along X lens+camera along X lens+camera along Z X-ruler
5.2) Control of the gluing: software manual • How to use the Saclay Projective Control Software: • Before to do some measurements you must fill the following fields (see also Fig. 1): • Chamber type (1): BIL, BML or BOL • Side (2): A or C. • Tower (3): Chamber tower number: 1=close to the central gap; 6=at highest rapidity. • Sector (4): ATLAS has 16 sector (e.g. 13 is in-between toroid “feet”). • Chamber local name (5): you can give here a local name for your chamber: e.g. BOL035. If this field is filled, you are not oblige to fill the “side” (2), the “tower” (3) and the “sector” (4) numbers. • Chamber side (6): HV or RO. • Tool number (7): this number, 1 or 2, is written on each “control tool”. You must used the same control tool number than the gluing tool number. • Total number of correct measurements (8) and rank (9): you can use up to 3 Icaras measurements for that control (the mean value will be taken). WARNING: the rank is numbered starting from the end: 1=last measurement, 2=the one before the last, etc… We provide this possibility, in case of measurement problem: e.g. you repeat 3 times the measurements, but for the second one, the Icaras output is incorrect. Then you must fill: “total number of correct measurement”=2 and rank= 1 (last) and 3 (first) or 3 and 1; and last “rank number” field is ignored. • Path and name of the input/output files (10): give the path of the Icaras file to be read (top) and the path of the output file (bottom). • When all previous fields are filled, you can calculate the projective platform position: • Ready for a measure (11): click on the white square to calculate projective platform position. • Icaras raw data (12): all Icaras data that are used appear in this zone for control. • Results (13): they are given in the chamber coordinates: x= wire axis, y=perpendicular to the multilayer plane and z=along the X-plate. Units are mm and radian. • Comment zone (14): “good” when gluing is correct at 1 sigma w.r.t. nominal values, • “good at 2 sigma” when gluing is correct at 2 sigma w.r.t. nominal • “bad a xxx sigma” otherwise. • Since the control and the gluing of projective platforms are performed using tools put directly on MDT tubes, we define the following sigma: on x: 400 mm, on y and z: 30 mm; 200 mrad for all rotations.
5.2) Control of the gluing: software manual (con’t) • SAVE (15): in order to record the data just taken, you must click on the “SAVE” box. In the output file specified in field number (10) all useful information will be recorded: date, chamber name, raw data from Icaras, tool number, reconstructed platform position, etc… The output file is an ASCII file. This file could be used to fill the Chamber Data Base on what concern projective platforms position. • QUIT (16): if you click on this box the data just taken are not recorded in the “record file”, specified in field number (10). You exit this program. • Important remarks: • In Icaras, the X_axiscamera channel must be recorded first. • If an -1 error message occurs, this is an unsuccessful open file, please phone us. 4 1 2 3 5 6 7 9 8 10 11 12 13 14 15 16 Fig. 1: dialog box seen on the screen