Download
1 / 22
220 likes | 316 Views
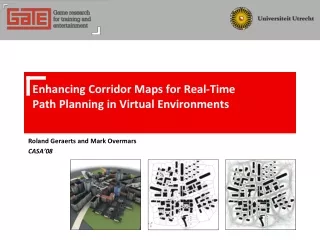
Creating High-quality Roadmaps for Motion Planning in Virtual Environments. Roland Geraerts and Mark Overmars IROS 2006. Requirements. The roadmap is resolution complete is small contains useful cycles provides high-clearance paths. res. complete, small useful cycles high-clearance paths.

E N D
Creating High-quality Roadmaps for Motion Planning in Virtual Environments Roland Geraerts and Mark Overmars IROS 2006
Requirements • The roadmap • is resolution complete • is small • contains useful cycles • provides high-clearance paths res. complete, small useful cycles high-clearance paths
Outline • Reachability Roadmap Method (RRM) • Resolution complete roadmap • Small roadmap • Adding useful cycles • Adding clearance to the roadmap • Experiments • Conclusions & current work
RRM – Criteria • Coverage • Each free sample can be connected to a vertex in the graph • Maximal connectivity • For each two vertices v’,v’’: • If there exists a path between v’ and v’’ in the free space, then there exists a path between v’ and v’’ in the graph
Reachability Roadmap Method • Paper • R. Geraerts and M.H. Overmars. Creating small roadmaps for solving motion planning problems. MMAR 2005, pp. 531-536 • Outline of algorithm • Discretizes the free space • Computes small set of guards • Guards are connected via connector • Resulting roadmap is pruned
v’ v Adding Useful Cycles • Paper • D. Nieuwenhuisen and M.H. Overmars. Useful cycles in probabilistic roadmap graphs. ICRA 2004, pp. 446-452 • Useful edge • Edge (v,v’) is K-useful if K * d(v,v’) < G(v,v’)
v’ v v’’ Adding Useful Cycles • Useful node • Node v is useful if there is an obstacle inside the cycle being formed
Adding Useful Cycles • Algorithm • Create RRM roadmap • Add useful nodes • Create a queue with all collision-free edges • Queue is sorted on increasing edge length • Add edge from the queue to the graph if edge is K-useful RRM useful nodes final roadmap
d d Providing High-clearance Paths • Paper • R. Geraerts and M.H. Overmars. Clearance based path optimization for motion planning. ICRA 2004, pp. 531-536 • Retract edges to the medial axis • Retraction of a sample
Providing High-clearance Paths • Paper • R. Geraerts and M.H. Overmars. Clearance based path optimization for motion planning. ICRA 2004, pp. 531-536 • Retract edges to the medial axis • Retraction of an edge
Field House Office Quake Experimental Setup
Experimental Results • Field RRM RRM* RRRM
Experimental Results • Field RRM RRM* RRRM
Experimental Results • Office RRM RRM* RRRM
Experimental Results • Office RRM RRM* RRRM
Experimental Results • House RRM RRM* RRRM
Experimental Results • House RRM RRM* RRRM
Experimental Results • Quake RRM RRM* RRRM
Experimental Results • Quake RRM RRM* RRRM
Conclusions • High-quality roadmap • resolution complete • small • short and alternative paths • high-clearance paths • fast query times
Future Work • Corridor Map Method • Creating high-quality paths within 1 ms • Paths are smooth, short or have large clearance • Method is flexible • Paths avoid dynamic obstacles
Future Work • Corridor Map Method • Creating high-quality paths within 1 ms • Paths are smooth, short or have large clearance • Method is flexible • Paths avoid dynamic obstacles Smooth path Short path Path avoiding obstacles