Download
1 / 1
10 likes | 98 Views
Goals and Motivation. Vicinity Source Routing (VSV) Design Ideas. message gathers routing info as it travels. A. AB. ABC. BCD. CDE. A. B. C. D. E. F. G. source. dest. F learns its 4-hop vicinity. Platform. A sends data to C via B. data. A. B. C. B rebroadcasts to C.

E N D
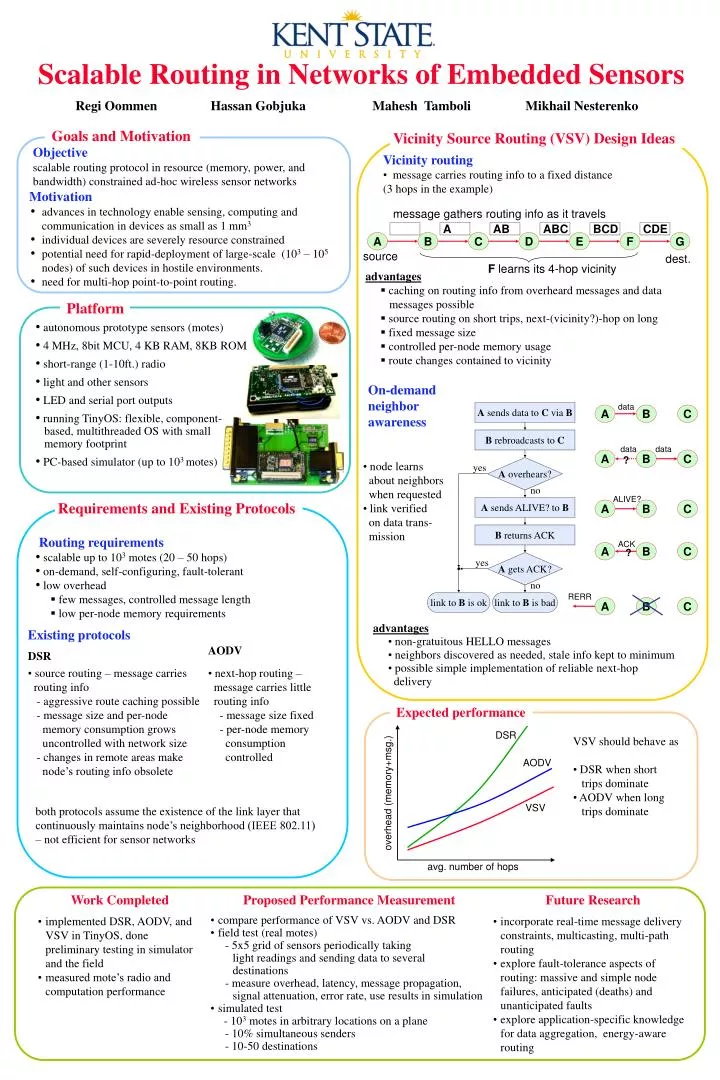
Goals and Motivation Vicinity Source Routing (VSV) Design Ideas message gathers routing info as it travels A AB ABC BCD CDE A B C D E F G source dest. F learns its 4-hop vicinity Platform A sends data to C via B data A B C B rebroadcasts to C Requirements and Existing Protocols data data A B C A overhears? ? yes no A sends ALIVE? to B ALIVE? A B C B returns ACK ACK A B C ? A gets ACK? yes no link to B is ok link to B is bad RERR A B C DSR Expected performance AODV overhead (memory+msg.) VSV avg. number of hops Regi Oommen Hassan Gobjuka Mahesh Tamboli Mikhail Nesterenko Scalable Routing in Networks of Embedded Sensors Objective scalable routing protocol in resource (memory, power, and bandwidth) constrained ad-hoc wireless sensor networks • Vicinity routing • message carries routing info to a fixed distance (3 hops in the example) • Motivation • advances in technology enable sensing, computing and communication in devices as small as 1 mm3 • individual devices are severely resource constrained • potential need for rapid-deployment of large-scale (103 – 105 nodes) of such devices in hostile environments. • need for multi-hop point-to-point routing. • advantages • caching on routing info from overheard messages and data messages possible • source routing on short trips, next-(vicinity?)-hop on long • fixed message size • controlled per-node memory usage • route changes contained to vicinity • autonomous prototype sensors (motes) • 4 MHz, 8bit MCU, 4 KB RAM, 8KB ROM • short-range (1-10ft.) radio • light and other sensors • LED and serial port outputs • running TinyOS: flexible, component- based, multithreaded OS with small memory footprint • PC-based simulator (up to 103 motes) On-demand neighbor awareness • node learns about neighbors when requested • link verified on data trans- mission • Routing requirements • scalable up to 103 motes (20 – 50 hops) • on-demand, self-configuring, fault-tolerant • low overhead • few messages, controlled message length • low per-node memory requirements • advantages • non-gratuitous HELLO messages • neighbors discovered as needed, stale info kept to minimum • possible simple implementation of reliable next-hop delivery • VSV should behave as • DSR when short trips dominate • AODV when long trips dominate both protocols assume the existence of the link layer that continuously maintains node’s neighborhood (IEEE 802.11) – not efficient for sensor networks Work Completed Proposed Performance Measurement Future Research • implemented DSR, AODV, and VSV in TinyOS, done preliminary testing in simulator and the field • measured mote’s radio and computation performance • compare performance of VSV vs. AODV and DSR • field test (real motes) • - 5x5 grid of sensors periodically taking light readings and sending data to several destinations • - measure overhead, latency, message propagation, signal attenuation, error rate, use results in simulation • simulated test • - 103 motes in arbitrary locations on a plane • - 10% simultaneous senders • - 10-50 destinations • incorporate real-time message delivery constraints, multicasting, multi-path routing • explore fault-tolerance aspects of routing: massive and simple node failures, anticipated (deaths) and unanticipated faults • explore application-specific knowledgefor data aggregation, energy-aware routing