Download
1 / 16
160 likes | 302 Views
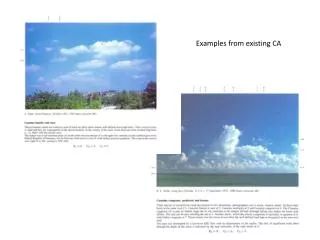
Reactive Pedestrian Path Following from Examples. Ronald A. Metoyer Jessica K. Hodgins Presented by Stephen Allen. Introduction. Need a system to model the movement of many people walking and interacting Want to maintain control over the path each individual takes

E N D
Reactive Pedestrian Path Following from Examples Ronald A. Metoyer Jessica K. Hodgins Presented by Stephen Allen
Introduction • Need a system to model the movement of many people walking and interacting • Want to maintain control over the path each individual takes • Hard to deal with collision avoidance with many characters • System that is easy for laymen to use
Previous Work • Reynolds • Boid Model for flocks, schools, and herds • Pedestrian Models • Fluid flow model • Inter-pedestrian interaction models (Helbing and Molnar) • Social interaction based on + and – potential fields • Lane formation in halls, queuing, turn taking
2D Character Intelligence • Exploit fact that humans have to move on a 2D plane (for the most part) • Basic level of intelligence • Reactive path following, obstacles, other pedestrians • Social Forces Model • Reactive control utilizes potential fields • Obstacles are repulsive • Goals are attractive
Modeling • Point mass dynamics • Update equation is: • Where the force fx is obtained from the potential field • dt is the simulation steps • m is the mass of the character • Although goal locations can be specified, it is desirable to allow a definable path for the character to follow • People are experts in drawing a path through a scene in the absence of moving obstacles • Can also be generated through automatic process
Path Diagram • User draws a spline path that he wants the character to follow • The path is converted into forces by the following: • Basically, this means that the character will attempt to follow the direction of the path, but as he gets more off track, he’ll be pulled back stronger
Direction Primitives • Intelligence model will produce correct 2D animation in terms of obstacle avoidance, but not necessarily natural looking • Alert user to potential collisions and ask how to resolve them • Navigation Primitives • Yield, Cut-in-front, Go-around-right, Go-around-left, No-action • Chosen based on traffic planning research
Direction Primitives (Cont.) • Focus on two tasks a pedestrian performs • Monitoring • Observing other pedestrians in the area to determine their navigational intents • Yielding • Act of adjusting velocity (Magnitude or Direction) to avoid a potential collision
Learning • Use previous direction primitive choices to aid the user in future decisions • Direction Primitive • Feature vector that describes current scene • Is the path around left blocked by other pedestrians or obstacles (Y or N) • Is the path around right blocked by other pedestrians or obstacles (Y or N) • Relative speed of the colliding pedestrian (5) • Approach direction of the colliding pedestrian (8) • Colliding pedestrian’s distance to collision (5) • Pedestrian’s distance to collision (5) • Desired travel direction (3)
Learning (Cont.) • Naïve Bayes Classifier • Five primitives are hypotheses • Seven variables are inputs • Potential collisions are classified into one of the 5 primitives • Advantages • Outperforms neural networks and machine learning algorithms in most real life cases • Disadvantages • Limited by the fact that it can only deal with discrete data • Inability to detect and account for nonlinear datasets
3D Motion Generation • Use motion capture • Create a directed graph of poses to get a probability matrix for transitions from one pose to another
Results • Compared the Naïve Bayes algorithm to actual choices made by users • Claim 72% accuracy as opposed to a random choice which would be 20% naturally • This doesn’t mean much, because all it is really testing is their ability to train a Bayes classifier
Limitations • Requires a lot of human intervention • Didn’t really go into how they mapped motion capture data to the trajectory paths • There is no motion capture data of a person stopped, so it appears the person is spinning around when standing still