Download
1 / 41
430 likes | 677 Views
Introduction to Robots and Multi-Robot Systems Agents in Physical and Virtual Environments. Intro to AI, l esson 10 Based on slides by Gal A. Kaminka and by Robin Murphy. www.sony.com. Some examples of robots. courtesy of Honda. courtesy of MIT AI Lab. www.irobot.com. ½ iRobot PackBot.

E N D
Introduction to Robots and Multi-Robot SystemsAgents in Physical and Virtual Environments Intro to AI, lesson 10 Based on slides by Gal A. Kaminka and by Robin Murphy
www.sony.com Some examples of robots courtesy of Honda courtesy of MIT AI Lab www.irobot.com
½ iRobot PackBot Less Famous Cousins at WTC Inuktun microTracks
Robot What is a robot? Give me a few examples. Is a rock a robot?
Robot What is a robot? A toy spring car can move and act. a robot can sense. Actuators (Effectors)
Robot What is a robot? A sorting algorithm senses and acts. a robot is persistent. Actuators (Effectors) Sensors
Robot What is a robot? What about a remote alarm? a robot is situated in an environment. Actuators (Effectors) Sensors
Robot What is a robot? We’re missing something here. a robot is responsive. Actuators (Effectors) Sensors Environment
Robot Process What is a robot? We’re missing something here. a robot is responsive. Actuators (Effectors) Sensors Environment
Here’s what we have so far Robots: • Are persistent with respect to their environment • Sense and act • Sense/act within the same environment (situated) • Respond to senses using action Robot Environment
Here’s what we have so far Robots: • Are persistent with respect to their environment • Sense and act • Sense/act within the same environment (situated) • Respond to senses using action These characteristic are true for agents, not just robots Robot Environment
Another definition • Mechanical creature which can function autonomously • Capek 1921: R.U.R • Mechanical= built, constructed • Creature= think of it as an entity with its own motivation, decision making processes • Function autonomously= can sense, act, maybe even reason; doesn’t just do the same thing over and over like automation • Physically situated, but now software agents or bots
Why investigate robots? (1) Because we want to understand how to build them. So that they do things for us. So that we can do other things instead. In other words, We are studying robotics because we are lazy.
Why investigate robots? (2) • Dirty, Dangerous, and Dull Tasks • Better Than Bio • Robots at WTC… • voids smaller than person could enter • voids on fire or oxygen depleted • Principles from robotics influenced AI community • Combines programming, networks, operating systems, algorithms, … everything about CS into a system (the ultimate software engineering project) Void:1’x2.5’x60’ Void on fire
Minimally Invasive SurgerySpinal Fusion with Mazor’s SpineAssist
The Agent/Environment/Task Framework • We want the robot to do tasks for us (or for itself) • Therefore, it must take a task into account Robot Environment Task
Problems with physical environments • Agents are embodied • Part of the environment is their own body • Sensing and acting with uncertainty • Slippery grips, sensing is inaccurate • Environment is dynamic, changes even without robot • …. We will talk more about environments later, but first….
A Taxonomy of Environments There are a number of characteristic dimensions: • Dynamic vs. static • Accessible vs. inaccessible • transparent vs. translucent • Deterministic vs. non-deterministic • Discrete vs. continuous • …..
Dynamic vs. Static • Dynamic: • Environment changes even if agent takes no action • Static: • Environment does not change until agent takes action • Key question: Is the agent only cause of change in the environment? • Physical environment is dynamic • Wind, other agents, continuous mechanical forces
Accessible vs. Inaccessible • Accessible (transparent): • Agent can sense everything and anything. Nothing is hidden. • Inaccessible (translucent): • Agent can only sense part of the environment. • Some features of the environment are hidden. • Key question: What can the agent sense about the environment? • Physical environments typically inaccessible: • Cannot see behind you, nor over long distances, nor inside people.
Determinism • Deterministic: • An action results in a completely predictable change • Non-deterministic: • An action can result in one of a range of possible changes • Uncertainty in the result • Key question: If agent takes action, is it sure of the outcome? • Physical environment is non-deterministic: • Slippery grasp, coin-flips, gambling
Discrete or continuous? • Discrete: • Actions or senses are clearly separated, limited number • Continuous: • Infinite possible values within a range • Note: • Different from discrete/continuous senses and actions • Physical environments are continuous
A Taxonomy of Environments There are a number of characteristic dimensions: • Dynamic vs. static • Accessible vs. non-accessible • transparent vs. translucent • Deterministic vs. non-deterministic • Discrete vs. continuous Open question: Quantifying the above
The Agent/Environment/Task Framework Given environment and task, how do we build a robot that carries out the task? Robot Environment Task
Agents and Environments • Many different environments can exist • Different techniques are used with different environments • We focus on techniques used in physical environments
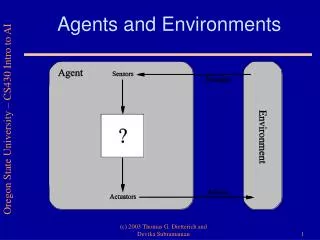
Agent Control • In principle, our view is of an agent with three components: • Effectors/actuators • Sensors • Think • This view is sometimes referred to as sense-think-act cycle • But this can be misleading: not necessarily so sequential Think Sense Act Robot Environment
Three components, three challenges* • The action selection problem: • Given task/goals, how to select the next action(s) • The sensor planning problem: • Given task/goals, how to use sensors • The pose planning problem: • Given needed target body position, how to get there Think Sense Act Robot Environment
Three components, three challenges* • The sensor planning problem: • Which sensors to use? When? • How to integrate their information (sensor fusion)? • How to overcome uncertainty in their readings? • May depend on what think is thinking, and may need to influence what action to take Think Sense Act Robot Environment
Three components, three challenges* • The pose planning problem: • Which (combination of) actuators to use to achieve pose? • What trajectory should they take? • How to compensate for actuation uncertainty? • May depend on what think is thinking, and may need to depend what sense reads, and needs Think Sense Act Robot Environment
Three components, three challenges* • The action-selection problem • How to select action in real-time? • How to select action that is good for task/goal? • How to integrate competing needs of different subtasks? • Depends on the capabilities of sense and act Think Sense Act Robot Environment
Three challenges • These three challenges are highly coupled • Not easy to separate them out. • Many systems/techniques provide integrated solutions • Multiple levels at which can be addressed: • hardware, control, software, … • Example: better vision by blurring camera • Example: using probabilistic inference to handle uncertainty • Example: sensor placement affects foraging behavior Robotics is a highly inter-disciplinary field.
Empirical research • As you can see, these are complex concepts • Many of problems/solutions affect each other in very subtle ways • Physical environments very uncertain, unpredictable • Difficult to predict system behavior from analysis • Cannot just browse at the algorithms and hardware involved • Use empirical research methods in investigations
Empirical research • Experiment design issues: • Study system with and without proposed techniques • Compare performance of many systems • Compare performance across different environments or tasks • Faces generality problems in drawing conclusions • Tied to the actual challenges of the real world:
Simulations • Significance issues: • Run many experiments, draw statistical conclusions • Simulation is very useful here • Many roboticists frown at simulations • Simulation and virtual environment are not same thing
Science and Scientists • Scruffies and Neaties • The revolution of 86: Plans are not enough!
The Sense-Think-Act Cycle:What's in Think (for scruffies) in late 80's? • No need to Think: If sensors read X, then do Y • Reactive Camp (Brooks 1986, Schoppers 1987) • Limited thinking: Behavior-based control • Behaviors may have state, memory, procedures • Arkin, Firby (1986), Maes, ... • Deep thinking: integrated planning, monitoring • e.g., IPEM (1988) • Hybrid architectures (e.g., Gat 1992)
The Sense-Think-Act Cycle:What's in Think (for neaties) in late 80's? • "The Old View" • Plans as sequences of actions for execution • Plans as mental attitudes (Pollack 1992) • Plans as recipes: Some get executed, some just known • BDI: Belief-Desire-Intention (approximately): • Belief: What the agent knows • Desire: What the agents ideally wants to see happening • Intention: What the agents actually acts towards • Commitments
Subjective Reactive-Plans, Architectures Mental Attitudes, Belief, Desire, Intention (BDI) Plans as Attitude Integrating Planning,Execution, Monitoring, Re-Planning, Architectures Behavior-Based Architectures An Historical Perspective on Teamwork:From a Single Agent to Multiple Agents Neatness Scruffiness Time '86 '90 '96
Agent Teams Are Everywhere:Teamwork is Important • Nature • Formations, flocking, pack hunting, software development • Robotic nature imitations, explorations, soccer • Internet, Intranets • Routing, distributed applications, groupware • Workflow, cooperating information agents • Virtual environments for training, simulations • Human-computer interactions
Main research problems General Teamwork: • Architecture • Flexible teamwork • Allocation • Learning, adaptation • Monitoring • Fault diagnosis • Maintenance • …. Task-Specific Teamwork: • Foraging • Coverage • Mapping • Coordinated movement • Patrolling • Human supervision • ….