Download

1 / 14
140 likes | 289 Views
From 3D Scene Geometry to Human Workspace. Authors: Abhinav Gupta, Scott Satkin , Alexei A. Efros and Martial Hebert The Robotics Institute, Carnegie Mellon University Presenter: Jiapei Zhang. Project Undertaking. Image if I were Abhinav

E N D
From 3D Scene Geometry to Human Workspace Authors: Abhinav Gupta, Scott Satkin, Alexei A. Efros and Martial Hebert The Robotics Institute, Carnegie Mellon University Presenter: Jiapei Zhang
Project Undertaking • Image if I were Abhinav • I received a project from my boss about indoor scene understanding
Selection of SubjectMaterial at hand • A set of indoor-scene images • Motion Capture Database • No LiDAR scanner, not as rich as VCC, China • How I wish to be a VCCer one day VCC V5
Selection of ProjectInspirations from Psychology • Where is the “entrance” of my novelty? • Where is the “Observer” for traditional Image Understanding? Put Human back to Image • Gestalt Psychologists: Objects are best defined not by their identity but rather by their function. The meaning or a value of a thing consist of what it affords. -----JJ Gibson(1979) “Affordance” “functionality”
Selection of ProjectShoulder of Giants • Bounding Box Level == Object Detection • Single-View Indoor Geometry Estimation • Human Pose Analysis via Motion Capture
Selection of ProjectGive a Final Word • Propose a scene representation that combines 3D scene geometry with a set of possible human actions, to create a joint space of human-scene interactions. • Predict the full human workspace of the scene Human Action Modeling 3D Scene Understanding
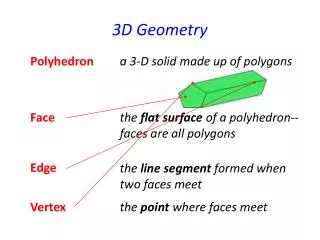
Implementation DetailRepresenting Scene Geometry • An indoor scene is modeled by the layout of room(walls, floors, ceilings) and the location/layout of objects. • The objects are modeled by a set of occupied voxels.
Implementation of DetailGeometry Estimation Sliding Cuboids Selection
Implementation of DetailQualitative Human Pose Representation • Each pose is represented by the occupied blocks in discretized 3D space(red) and the required surfaces of interaction(green).
Implementation of DetailHuman-Scene Interactions • Constraints • Binary Occupancy Matrix • “Space Search” to fit “Constrains” Free space constrain Supportconstrain
Retrospect and Meditation • Now return back to me • What useful info. for our Indoor-Scene Project I could extract from this paper ?
Retrospect and Meditation • Incorporate images to our projects Will geometry estimation improve our rough mesh model? • Categorize “mobility” of scene into two: • Extract from Repetitions: Based on Geometry • Extract from “Human Pose”: Based on Functionality