Download
1 / 53
540 likes | 795 Views
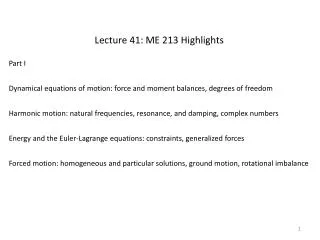
ME 213 MECHANICAL SYSTEMS. (commonly called “vibrations”). We will look at vibrations and controls , which are connected. (I think of vibrations as being nested in controls.). Today. We are going to get organized. Sign up sheet. Get an overview of the course.

E N D
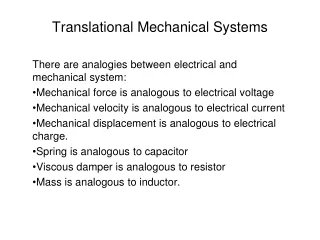
ME 213 MECHANICAL SYSTEMS (commonly called “vibrations”) We will look at vibrations and controls, which are connected. (I think of vibrations as being nested in controls.)
Today We are going to get organized Sign up sheet Get an overview of the course Take a first look at a general one degree of freedom system Learn a little about complex numbers and the connections between exponentials and sines and cosines
STAFF Professor Gans: Hopeman 330 gans@me.rochester.edu Course web page: www.me.rochester.edu/courses/ME213 Most of what is there now is from last year I’ll be updating as we go along TA Mike Torres mtorr11@z.rochester.edu Graders John Cormack: jcormack@u.rochester.edu Xiang Liu: xliu37@u.rochester.edu
AVAILABILITY I will be on campus Tuesdays and Thursdays from about 8:30 am I will never be here on Wednesdays or Monday and Friday mornings I’m real good about reading my email TA office hours TBD
GRADING Two midterms, 1/3 each 10-12 problem sets, another 1/3 (I’ll throw out the lowest grade) Assigned on Thursdays, due the following Thursday posted on the web site (not Blackboard) (yes there is one today) Optional final 1/2 if you take it.
Problem Grading Scheme We will grade problems on a scale of 0 to 4. We expect you to be able to explain your work. The meaning of each grade is as follows: 4: Correct answer with an essentially correct solution/explanation/derivation 3: Correct answer with shaky supporting calculations 2: Incorrect answer with an approach showing some understanding of the material; correct answer with no supporting calculations. 1: Inconclusive calculations that at least are relevant to the problem 0: Incorrect or no answer with no relevant statements; problem not attempted. This applies to exam questions as well as problem set questions
Textbook is new this year — mine First half (vibrations) is available from the Dept Office now for $15 Mistakes and additions will show up as we go along. I’ll post these on the bulletin board associated with the website Second half (controls) will be available in February I still like Den Hartog and Friedland which should be on reserve
Vibrations include (among many other things) musical instruments unbalanced rotating machinery Earthquakes: seismometers accelerometers: air bag sensor
Control means to make a system do what you want stabilize unstable systems (inverted pendulum, unstable fighter aircraft, . . . ) cruise control overhead crane and LOTS more
The moving finger writes; and having writ, Moves on: nor all thy Piety nor wit, Shall lure it back to cancel half a Line
It is very important to interrupt me if you lose the thread of the argument Otherwise we’re all wasting our time
What do I expect you to know? (prerequisites) • Dynamics (ME 121) • ordinary differential equations (Math 163/165) • linear algebra (Math 165/163) • complex numbers would be nice but I’ll give you most of what you need today We’ll fill gaps in your preparation as necessary I’ll review complex numbers at some length today
What are we going to learn? “Tools” Mathematica (starting at first recitation) Linearization (informally today) Lagrangian dynamics Fourier series (spectra) Laplace transforms Systems of linear odes
Topics: Vibrations and mechanical systems: One degree of freedom systems Many degree of freedom systems State space formulations: a connecting link Linear control of single input systems
What’s a state? It’s a vector way of characterizing a system I’ll spend some time on this, but for now, an example The state of a pendulum is characterized by its angle and its rotation rate We can make a vector out of this Given the state at one time, we can use differential equations to find the state at any time in the future
I don’t know how far we’ll get on controls Control topics: Drive a state to zero when you can measure the whole state Drive a state to zero when you can’t measure the whole state Make a state follow a time-dependent reference state
Some vocabulary Degrees of freedom: the number of possible independent motions (We’ll discuss this at length later on.) Inputs: forces and/or torques that act on a system Sometimes the input may be the voltage to a motor providing force or torque Outputs: one or more variables associated with the system
We address mechanical systems through models A model of a mechanical system is made up of components rigid masses, springs, dampers — maybe motors Control engineers call the actual system the plant We will need to make models of plants which is in some ways equivalent to study of vibrations much of the mathematics is the same Eventually we will connect everything, as on the next slide which shows a diagram of a control system
Ideal output INVERSE PLANT GOAL Mechanical/electromechanical system Actual output + + disturbance input PLANT + - - error feedback CONTROL
CRUISE CONTROL desired speed INVERSE PLANT GOAL: SPEED nominal fuel flow Actual speed + + PLANT: DRIVE TRAIN Input: fuel flow - - error disturbance Feedback: fuel flow CONTROL
PLANT/INVERSE PLANT essentially the first half of the course inertia external forces (torques, voltages) friction/damping energy storage/internal forces (springs, etc.) We need to make mathematical models that incorporate these
Excuse me, Professor What has this got to do with vibrations? (One answer is that “vibrations” is a poor name for the course)
The plant is a mechanical system: rigid objects connected by springs, dampers, hinges, etc. Vibrations are oscillatory motion (generally unwanted) Models of vibrating systems are also mechanical systems: masses connected by springs, dampers, hinges, etc. We use the same mathematical tools to understand a plant and vibrations, and to control both
The plant obeys Newton: f = ma The simplest vibration is harmonic: y = Asin(wt) It satisfies for a linear spring The force is
We will start simply with one degree of freedom systems These are systems that we can suppose have only one motion: a pendulum, with or without damping a mass on a spring, with or without damping Real systems are more complicated, but often a one degree of freedom model is good enough. If it has one frequency, we can model it as a one degree of freedom (DOF) system
I’ll spend a lot on degrees of freedom later For now, let’s say that one degree of freedom means only one motion is possible — like a pendulum
We are going to deal with planar mechanisms I will adopt the convention that we are in the x = 0 plane I will use y and z as position variables; gravity points down z g y
Dynamics and components We can combine these to make one degree of freedom systems
We’ll have different ways to represent one degree of freedom systems which I show on the next slide These are “naturally” second order ordinary differential equations But a second order ode can be written as two first order odes We call that representation a state space representation Finally we can draw block diagrams which is common in many control texts and something I find increasingly useful
First a physical sketch m c f k The force acts to pull the mass to the right the spring and the damper resist this motion
Then a free body diagram m fc f fk
second order ode representation External force+spring+damper state space representation or simple block diagram representation - + f/m v y -
The second order mathematics Linear homogeneous ordinary differential equations with constant coefficients have exponential solutions!
In both cases the exponent can be complex, so we need to know something about complex numbers Complex numbers come from the need to have roots for all polynomials For example and real numbers don’t work this way We define
A complex number has a real part and an imaginary part Note that the imaginary part is a real number, here b We can introduce the complex plane which will be very useful later
COMPLEX NUMBERS ON THE COMPLEX PLANE Im(z) h Re(z) x
Some useful manipulations division Complex conjugate
We can make this plausible by looking at the Taylor series for sine, cosine and the exponential
We can plot this on the complex plane and learn some more tricks We have the old diagram
Im h Re x We can write
Im rsinq r q Re rcosq
differentiation is the same as multiplying by j which we can plot on the plane cosq Im multiplying by j is equivalent to a ccw rotation by π/2 q -sinq Re
We can use the diagram to see the relation between the two representations Im rsinq r q Re rcosq
from which we can move between the Cartesian and polar representations
The real part operator The imaginary part operator The imaginary part is a real number It does NOT include the j
The general exponential solution can oscillate growth or decay harmonic part
We are going to do a lot of plotting — getting a graphical handle on things Let me start with plotting displacement, velocity and acceleration Suppose that displacement is proportional to cos(wt) The real part of ejwt 50