Download
1 / 17
170 likes | 302 Views
P09011 – Object Recognition - 1/9/2009. System level design progress report. Operator and whale safe Quiet Durable & weatherproof No external power Able to hide sample from trainer Compact Able to block whale’s view of both object sets at once 35” total design width

E N D
P09011 – Object Recognition - 1/9/2009 System level design progress report
Operator and whale safe • Quiet • Durable & weatherproof • No external power • Able to hide sample from trainer • Compact • Able to block whale’s view of both object sets at once • 35” total design width • 3-5sec target time between object set display, 10sec max • 10lb max object weight
Objects sets raised and lowered independently on cables • Cable movement provided by separate electric winches • Winches controlled remotely • Object travel electronically limited • Powered by on-board 12V battery
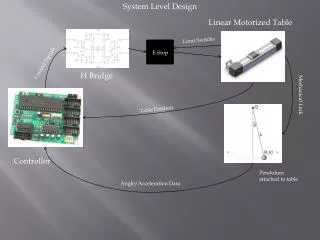
Object sets raised and lowered independently on cables connected to pivoting arms • Pivoting arms are positioned 90 degrees to one another • Upper section of apparatus rotates on human-powered turntable to change object sets • Pivoting arm movement provided by electric linear actuators (expanding cylinder) • Linear actuators controlled remotely • Object travel electronically controlled by limit switches • Powered by on-board 12V battery
Dr. Varela: • Search McMaster and Grainger for off-the-shelf winches • Avoid trying to build your own winch setup • Dr. Walter: • When considering design feasibility, don’t forget to perform evaluation of battery requirements for electrically powered design • Consider and evaluate safety concerns with electricity flowing through apparatus, remote control • Look at MSD# P06606 (Remote Operated Aquatic Motorized Explorer) for underwater electronics shielding
Research into winches yielded that they: • Are designed for much higher loads and much slower speeds • Do not meet customer’s weight requirements – heavy (100-150lbs) • Do not meet customer’s time requirements – run too slow (3-40 feet per minute) • Do not meet duty cycle requirements • Have varying costs – some fall well within budget, some well outside • Look for servos, stepper motors, etc. that fit design.
Research into linear actuators yielded that they: • Are designed to meet our requirements for weight, load capacity, speed, and duty cycle • Have varying costs – some fall well within budget, some well outside • Get quotes to determine if component fits budget constraints
Complete Risk Assessment • Gain more information about components • Select single concept • Complete detailed design