Download
1 / 1
10 likes | 369 Views
Comparison of OBPRM-like generation methods for flexible ligands Distance to Binding Configuration goal User attaches haptic device to ligand, and moves it around user feels the forces on ligand ligand is rigid

E N D
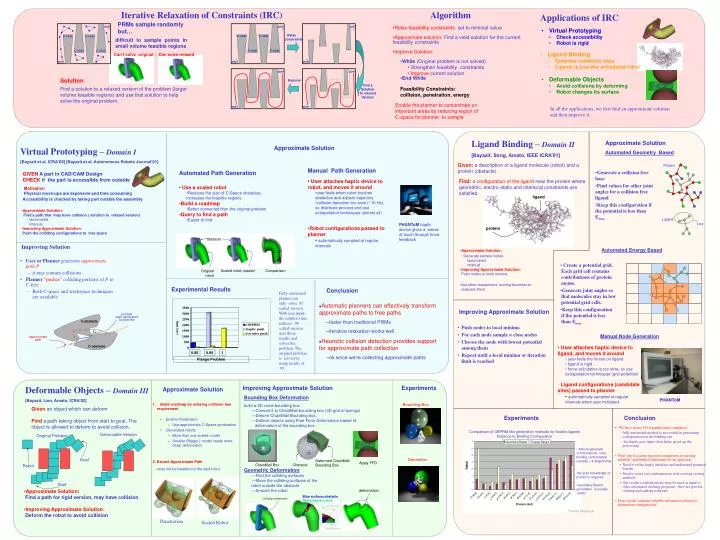
Comparison of OBPRM-like generation methods for flexible ligands Distance to Binding Configuration goal • User attaches haptic device to ligand, and moves it around • user feels the forces on ligand • ligand is rigid • force calculation is too slow, so use extrapolation techniques (grid potential) • Ligand configurations (candidate sites) passed to planner • automatically sampled at regular intervals when user indicated goal • Virtual Prototyping • Check accessibility • Robot is rigid • Able to generate conformations near • binding conformation (usually < 4 Angstroms) • No prior knowledge of protein is required • Geometry-Based generation is usually • better goal C-obst C-obst C-obst C-obst C-obst C-obst • Ligand Binding • Generate candidate sites • Ligand is tree-like articulated robot pushed path generated by planner deformation start C-obst C-obst start Blue surface=obstacle Red surface=robot. Colliding configuration start PHANToM • Deformable Objects • Avoid collisions by deforming • Robot changes its surface base * * * Deformed ChainMail Bounding Box *Tried by Singh et al. Apply FFD ChainMail Box Obstacle obstacle Scaled robot (easier) Comparison Original robot Conclusion Experimental Results • Automatic planners can effectively transform approximate paths to free paths • faster than traditional PRMs • iterative relaxation works well • Heuristic collision detection provides support for approximate path collection • ok since we’re collecting approximate paths 0.85 0.95 1 Flange Problem Iterative Relaxation of Constraints (IRC) Algorithm Applications of IRC PRMs sample randomly but… • Relax feasibility constraints: set to minimal value • Approximate solution: Find a valid solution for the current feasibility constraints • Improve Solution: • While (Original problem is not solved) • Strengthen feasibility constraints • Improve current solution • End While Relax constraints difficult to sample points in small volume feasible regions Can’t solve original Can solve relaxed goal goal Solution Improve Find a Solution To relaxed Version Find a solution to a relaxed version of the problem (larger volume feasible regions) and use that solution to help solve the original problem. Feasibility Constraints: collision, penetration, energy Enable the planner to concentrate on important areas by reducing region of C-space for planner to sample start start In all the applications, we first find an approximate solution and then improve it. Ligand Binding – Domain II [Bayazit, Song, Amato, IEEE ICRA’01] Approximate Solution Automated Geometry Based Approximate Solution Virtual Prototyping – Domain I [Bayazit et.al. ICRA’00] [Bayazit.et.al. Autonomous Robots Journal‘01] Given:a description of a ligand molecule (robot) and a protein (obstacle). Protein Manual Path Generation Automated Path Generation • Generate a collision free base • Find values for other joint angles for a collision free ligand • Keep this configuration if the potential is less than Emax GIVENA part in CAD/CAM Design CHECKif the part is accessible from outside • User attaches haptic device to robot, and moves it around • user feels when robot touches obstacles and adjusts trajectory • collision detection too slow (~10 Hz), so distribute process and use extrapolation techniques (almost all) • Robot configurations passed to planner • automatically sampled at regular intervals Find:aconfiguration of the ligandnear the protein where geometric, electro-static and chemical constraints are satisfied. • Use a scaled robot • Reduces the size of C-Space obstacles, increases the feasible regions • Build a roadmap • Better connected then the original problem • Query to find a path • Easier to find Motivation Physical mock-ups are expensive and time consuming ligand Accessibility is checked by taking part outside the assembly • Approximate Solution: • Find a path that may have collision ( solution to relaxed version) • automated • manual • Improving Approximate Solution: • Push the colliding configurations to free space Ligand PHANToM haptic device gives a sense of touch through force feedback protein Improving Solution Automated Energy Based • Approximate Solution: Generate sample nodes • automated • manual • Improving Approximate Solution: Push nodes to local minima. Use other researchers’ scoring functions to evaluate them. • User or Planner generatesapproximate path P • it may contain collisions • Planner“pushes” colliding portionsof P to C-free • Both C-space and workspace techniques are available • Create a potential grid. Each grid cell contains contributions of protein atoms. • Generate joint angles so that molecules stay in low potential grid cells. • Keep this configuration if the potential is less than Emax. Fully automated planner can only solve .85 scaled version. With user input, the solution time reduces.. 96 scaled version uses those results and solves the problem. The original problem is solved by using results of .95. Improving Approximate Solution C-obstacle • Push nodes to local minima • For each node sample n close nodes • Choose the node with lowest potential among them • Repeat until a local minima or iteration limit is reached Manual Node Generation approximate path C-obstacle Deformable Objects – Domain III [Bayazit, Lien, Amato, ICRA’02] Improving Approximate Solution Experiments Approximate Solution • Bounding Box Deformation • build a 3D voxel bounding box. • Convert it to ChainMail bounding box (3D grid of springs) • Deform ChainMail Bounding box. • Deform objects using Free Form Deformation based of • deformation of the bounding box. • Build roadmap by relaxing collision free • requirement Bounding Box Givenan object which can deform Finda path taking object from start to goal. The object is allowed to deform to avoid collision. Experiments Conclusion • Enable Penetration • Use approximate C-Space penetration • Use scaled robots • More than one scaled model. • Smaller (Bigger ) model needs more (less) deformation. • We have tested 15+ ligand/protein complexes • fully automated method is successful in generating configurations in the binding site • the haptic user-input often helps speed up the processing • Next step is a more rigorous comparison to existing methods, and further refinement of our approach • Need to refine haptic interface and understand potential benefit • Need to score our conformations with existing scoring methods • Our results (conformations) may be used as input to other automated docking programs - they are good at refining and ranking solutions • Does a path contains valuable information related to destination configuration? Deformable Version Original Problem Geometric Goal 2. Extract Approximate Path Robot • may not be feasible for the rigid robot • Geometric Deformation • Find the colliding surfaces • Move the colliding surfaces of the robot outside the obstacle • Smooth the robot Start • Approximate Solution: • Find a path for rigid version, may have collision • Improving Approximate Solution: • Deform the robot to avoid collision Penetration Scaled Robot