Download
1 / 25
250 likes | 358 Views
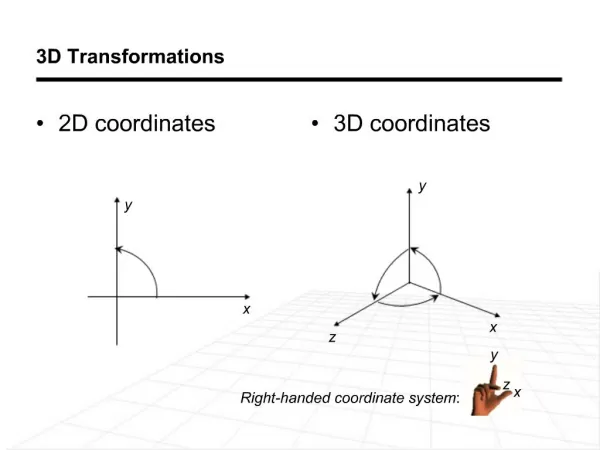
2D-Heat. equation. < CUDA implementation >. Überblick. Definition Diskretisierung Iterationsverfahren Mapping auf Cuda Implementierung Optimierung Performance Vergleiche Probleme Demo. Definition. Mathematische Definition (2D):

E N D
2D-Heat equation < CUDA implementation>
Überblick • Definition • Diskretisierung • Iterationsverfahren • Mapping auf Cuda • Implementierung • Optimierung • Performance Vergleiche • Probleme • Demo
Definition Mathematische Definition (2D): Beschreibt den Temperaturverlauf der - Fläche über der Zeit . Anwendungen in: Finanz Mathematik Statistik Physik, Chemie
Überblick Definition Diskretisierung Iterationsverfahren Mapping auf Cuda Implementierung Optimierung Performance Vergleiche Probleme Demo
Diskretisierung Diskretisierung des Gebietes Finite Differenzen Methode (FDM)
Überblick Definition Diskretisierung Iterationsverfahren Mapping auf Cuda Implementierung Optimierung Performance Vergleiche Probleme Demo
Iterationsverfahren Einsetzen in die DGL ergibt finiten Differenzenstern Filtern des „Bildes“ mit diesem Filterkernel ergibt einen Zeitschritt Berechnungsverfahren: Jacobiverfahren gut parallelisierbar Gauß-Seidel Verfahren schlecht parallelisierbar
Überblick Definition Diskretisierung Iterationsverfahren Mapping auf Cuda Implementierung Optimierung Performance Vergleiche Probleme Demo
Mapping auf Cuda Durch Jacobiverfahren können viele Pixel unabhängig voneinander berechnet werden Kernel (Thread) berechnet ein gefiltertes Pixel Benötigt 4 umliegende Werte und sich selbst Grid berechnet eine Iteration (einen Filterdurchlauf) Bild wird in Blöcke zerlegt Anzahl der Iterationen (Filteraufrufe) bestimmt die simulierte Zeit der zu lösenden heat equation
Überblick Definition Diskretisierung Iterationsverfahren Mapping auf Cuda Implementierung Optimierung Performance Vergleiche Probleme Demo
heat.cu void heat() { // Kernel Konfiguration dim3 block(BLOCK_SIZE_X, BLOCK_SIZE_Y, 1); dim3 grid(width / block.x, height / block.y, 1); // Filteraufruf for(i = 0; i < iterations; i++) { filter<<<grid, block>>>(d_src, d_dst, width, height); // Pointeraustausch tmp = d_src; d_src = d_dst; d_dst = tmp; } }
heat_kernel.cu (global) __global__ void filter_global(float* d_src, float* d_dst, int width, int height) { // Referenz ist linke obere Ecke des Filter Kernels intx = blockIdx.x * blockDim.x + threadIdx.x; inty = blockIdx.y * blockDim.y + threadIdx.y; inti = y * width + x; if(x < width - 2 && y < height - 2) { float sum = 0.0; // oben sum += 0.25 * d_src[i + 1]; // links sum += 0.25 * d_src[i + width]; // rechts sum += 0.25 * d_src[i + width + 2]; // unten sum += 0.25 * d_src[i + 2 * width + 1]; // Mitte schreiben d_dst[i + width + 1] = sum; } }
heat_kernel.cu (shared) __shared__ float img_block[BLOCK_SIZE_X + 2][BLOCK_SIZE_Y + 2]; img_block[tx + 1][ty + 1] = d_src[i]; // Mitte lesen __syncthreads(); if(x > 0 && x < width - 1 && y > 0 && y < height - 1) {//Bildrand nicht if(tx == 0) { verändern img_block[tx][ty + 1] = d_src[i - 1]; // links } else if(tx == blockDim.x - 1) { img_block[tx + 2][ty + 1] = d_src[i + 1]; // rechts } if(ty == 0) { img_block[tx + 1][ty] = d_src[i - width]; // oben } else if(ty == blockDim.y - 1) { img_block[tx + 1][ty + 2] = d_src[i + width]; // unten } __syncthreads(); // Rechnen float sum = 0.0; sum += 0.25 * img_block[tx][ty + 1]; sum += 0.25 * img_block[tx + 2][ty + 1]; sum += 0.25 * img_block[tx + 1][ty]; sum += 0.25 * img_block[tx + 1][ty + 2]; d_dst[i] = sum; // Zurückschreiben }
Überblick Definition Diskretisierung Iterationsverfahren Mapping auf Cuda Implementierung Optimierung Performance Vergleiche Probleme Demo
Optimierung • Speicherzugriffe zw. Host u. Device • Durch umbiegen der Zeiger minimiert • Shared memory verwendet • Coalscaled Speicherzugiff • 32 * 4 Byte = 128 Byte werden pro Warp linear gelesen • Startadresse des source-images ist ganzzahliges Vielfaches von 128 • Rechnen auf Shared Memory schneller • Occupancy maximiert • Beste Kernel Konfiguration für unser Problem gefunden
Überblick Definition Diskretisierung Iterationsverfahren Mapping auf Cuda Implementierung Optimierung Performance Vergleiche Probleme Demo
GPU vs. CPU Single Core (faui07g) : Intel Pentium 4 → 2.4 GHz Dual Core (faui08) : AMD Opteron → 2.2 GHz Quad Core (faui06i): Intel Q6600 → 2.4 GHz
Überblick Definition Diskretisierung Iterationsverfahren Mapping auf Cuda Implementierung Optimierung Performance Vergleiche Probleme Demo
Probleme • Bildgrößen nur als Vielfaches von Blockgröße möglich • Zeiten messen • Timer in cuda hat inkonsistente Zeiten geliefert • Profiler liefert bessere Ergebnisse • Teilweise Branching und Bankkonflikte nicht vermeidbar
Überblick Definition Diskretisierung Iterationsverfahren Mapping auf Cuda Implementierung Optimierung Performance Vergleiche Probleme Demo
Demo • Sascha …
→ → ? →