Download
1 / 34
350 likes | 487 Views
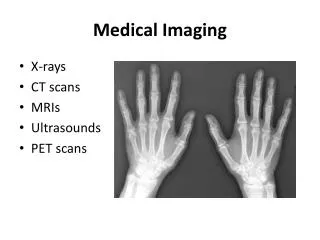
Medical Imaging. Dr. Mohammad Dawood Department of Computer Science University of Münster Germany. Recap. Sound waves Piezoelectric crystals Wave front formation. Inverse Radon transform Filtered back projection. Filtered back projection.

E N D
Medical Imaging Dr. Mohammad Dawood Department of Computer Science University of Münster Germany
Inverse Radon transformFiltered back projection Filtered back projection
Registration T : Transformation In this lecture Floating image : The image to be registered Target image : The stationary image
Registration Linear Transformations - Translation - Rotation - Scaling - Affine
Registration 3D Translation
Registration 3D Rotation
Registration 3D Scaling
Registration Rigid registration Angles are preserved Parallel lines remain parallel
Registration Affine registration
Registration Feature Points
Registration Feature Points 1. De-mean 2. Compute SVD 3. Calculate the transform
Registration Feature Points Iterative Closest Points Algorithm (ICP) 1. Associate points by the nearest neighbor criteria. 2. Estimate transformation parameters using a mean square cost function. 3. Apply registration and update parameters.
Registration Feature Points
Registration Feature Points Random Sample Consensus Algorithm (RNSAC) 1. Transformation is calculated from hypothetical inliers 2. All other data are then tested against the fitted model and, if a point fits well to the model, also considered as a hypothetical inlier 3. The estimated model is reasonably good if sufficiently many points have been classified as hypothetical inliers. 4. The model is re-estimated from all assumed inliers 5. Finally, the model is evaluated by estimating the error of the inliers relative to the model
Registration Distance Measures - Sum of Squared Differences (SSD) - Root Mean Square Difference (RMSD) - Normalized Cross Correlation (NXCorr) - Mutual Information (MI)
Registration Sum of Squared Differences SSD(f,t) SSD(20f,t)
Registration Root Mean Squared Differences RMS(f,t) RMS(20f,t)
Registration Normalized Cross Correlation NXCorr(f,t) NXCorr(20f,t)
Registration Mutual Information MI(f,t) MI(20f,t)
Define a joint probability distribution: Generate a 2-D histogram where each axis is the number of possible greyscale values in each image each histogram cell is incremented each time a pair (I1(x,y), I2(x,y)) occurs in the pair of images If the images are perfectly aligned then the histogram is highly focused. As the images mis-align the dispersion grows recall Entropy is a measure of histogram dispersion Entropy for Image Registration
Optical flow Brightness consistency constraint With Taylor expansion V : Flow (Motion)
Optical flow Lucas Kanade Algorithm: Assume locally constant flow =>
Optical flow Horn Schunck Algorithm: Assume globally smooth flow
Optical flow Bruhn’s Non-linear Algorithm
PET no AC – gated PET no AC – gated, MC corrected
Cardiacmotion Ungated data Large blur, low noise (Problem in plaque imaging) Onephase Small blur, highnoise
Systole Diastole Continuity Equation: