Download
1 / 11
110 likes | 264 Views
Object Detection Using Marked Point Process. CMPUT 615 Nilanjan Ray. Object Detection. Often we are asked to detect objects in an image, where the number of objects is not known a priori

E N D
Object Detection Using Marked Point Process CMPUT 615 Nilanjan Ray
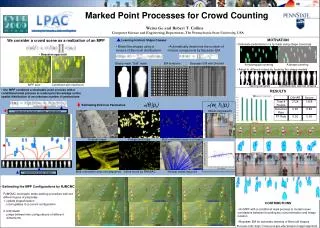
Object Detection • Often we are asked to detect objects in an image, where the number of objects is not known a priori • We may have knowledge about object likelihood, i.e., a good sense of what is a good measurement, what is not • We may also have some knowledge about spatial distribution of the objects • Can we put together all the pieces of information in a nice computational framework for object detection? Yes! Marked point process framework can be utilized here
Object Detection: Point Process • A point process (aka spatial point process) can attach a probability to a configuration of points on a space • A point can have its marks. For example, an ellipse center is the point and its marks are the orientation and two radii • Thus, a point together with its marks can represent an object that we want to detect from an image
Point Process Prior a ~ U(amin, amax), b ~ U(bmin, bmax), θ ~ M(ξ), g1 marks Interaction function: A point consists of a center and its marks (mi)
Simulations From Marked PP Prior Four realizations
Metropolis-Hastings Algorithm • Has 3 move types • Birth of a new point • Death of an existing point • Altering marks of an existing point • Each such move type is accepted or rejected via a ratio (a dimensionless number) called MH ratio • This process simulation is run a long time– until the configuration converges
Summary • Spatial point process is excellent in modeling object level information • Can deal with variable number of objects in an image • The downside is long computations: sampling based techniques take a long time