Download
1 / 6
70 likes | 260 Views
MAGIC Ship Motion Corrections for the ARM Radars. David Troyan First MAGIC Workshop. Ship Motion. There are three primary angular variables that indicate the ship’s location relative to the Earth-based vertical coordinates: Pitch: Rotation about the minor axis (bow up is positive)

E N D
MAGIC Ship Motion Corrections for the ARM Radars David Troyan First MAGIC Workshop
Ship Motion • There are three primary angular variables that indicate the ship’s location relative to the Earth-based vertical coordinates: • Pitch: Rotation about the minor axis (bow up is positive) • Roll: Rotation about the major axis (port up is positive) • Yaw: Heading angle rotation (clockwise is positive) • Heave is the distance of rise and fall from a standard calm sea • Heave velocity is rate of heave change • Sway, and Surge are not used in the transforms
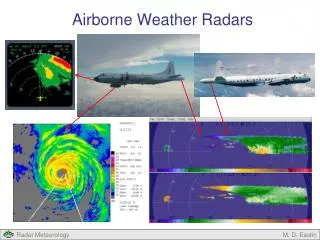
Ship Motion Applied to Radars • Shipboard Radars: KAZR – Ka-Band ARM Zenith Radar (not stabilized) MWACR – Marine W-Band ARM Cloud Radar (stabilized) • Correction to the Doppler Velocity: • KAZR: Determining the vertical velocity that would have been measured at each sample time if the radar beam was vertical Geometric correction Contribution to horizontal wind • KAZR and MWACR: Adding the ship heave velocity to the vertical velocity component to determine the corrected, Earth-relative, vertical velocity
Ship Motion Applied to Radars II • Correction to the height coordinates • Geometric correction • Time varying • Implications are that height dependent variables – e.g. cloud base height, cloud tops – are not on a uniform grid • Both KAZR and MWACR
Examples of Differences Original Motion Corrected Difference KAZRGE 2012-12-11 Range (m/s): -6(Blue) to 2 (Red) Range (m/s): -6(Blue) to 2 (Red) Range (m/s): -1.5(Blue) to 1.5 (Red) Original Motion Corrected Difference MWACR 2012-12-11 Range (m/s): -6(Blue) to 2 (Red) Range (m/s): -6(Blue) to -6 (Red) Range (m/s): -1.5(Blue) to 1.5 (Red)
Data Status and Future Work • Data is located in the Evaluation Area on the ARM data page (listed under shipcor) • Datastream names are magkazrshipcor1ci, magkazrshipcor1ge, magmwacrshipcor1 • Available time is from 9/22/12 to 1/8/13 • Please evaluate these data and provide feedback (especially for the height field issue) • Additional instruments will be corrected for height fields: VaisalaCeliometer (VCEIL) High Spectral Resolution Lidar (HSRL) MicropulseLidar (MPL)