Download
1 / 1
10 likes | 143 Views
The Monarch Project. Base station 2. Robot 1. PRAN: Physical Implementation and Evaluation of Ad Hoc Network Routing Protocols using Unmodified Simulation Models http://monarch.cs.rice.edu/ Amit Saha, Khoa To, Santashil PalChaudhuri, Shu Du, and David B. Johnson

E N D
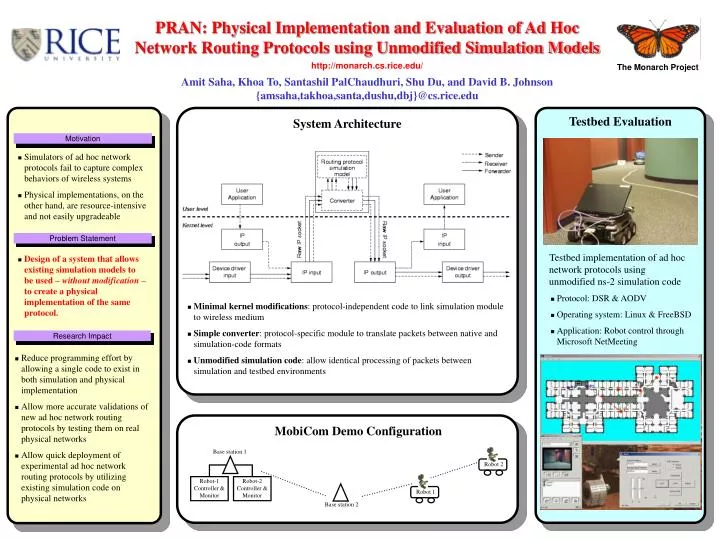
The Monarch Project Base station 2 Robot 1 PRAN: Physical Implementation and Evaluation of Ad Hoc Network Routing Protocols using Unmodified Simulation Models http://monarch.cs.rice.edu/ Amit Saha, Khoa To, Santashil PalChaudhuri, Shu Du, and David B. Johnson {amsaha,takhoa,santa,dushu,dbj}@cs.rice.edu System Architecture Testbed Evaluation Motivation • Simulators of ad hoc network protocols fail to capture complex behaviors of wireless systems • Physical implementations, on the other hand, are resource-intensive and not easily upgradeable Problem Statement Testbed implementation of ad hoc network protocols using unmodified ns-2 simulation code • Protocol: DSR & AODV • Operating system: Linux & FreeBSD • Application: Robot control through Microsoft NetMeeting • Design of a system that allows existing simulation models to be used – without modification – to create a physical implementation of the same protocol. • Minimal kernel modifications: protocol-independent code to link simulation module to wireless medium • Simple converter: protocol-specific module to translate packets between native and simulation-code formats • Unmodified simulation code: allow identical processing of packets between simulation and testbed environments Research Impact • Reduce programming effort by allowing a single code to exist in both simulation and physical implementation • Allow more accurate validations of new ad hoc network routing protocols by testing them on real physical networks • Allow quick deployment of experimental ad hoc network routing protocols by utilizing existing simulation code on physical networks MobiCom Demo Configuration Base station 1 Robot 2 Robot-1 Controller & Monitor Robot-2 Controller & Monitor